导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
2046 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人关节
时长:4 分钟
类别:工业机器人技术
简介:机器人关节的运功控制必须尽可能精确,才能充分利用机器人的能力。
标签:
教学
工业机器人技术
机器人关节
相关视频:
大疆无人机生产线
来到大疆无人机的总部,看看他们高度自动化的集中装配生产线,如何生产和测试无人机。
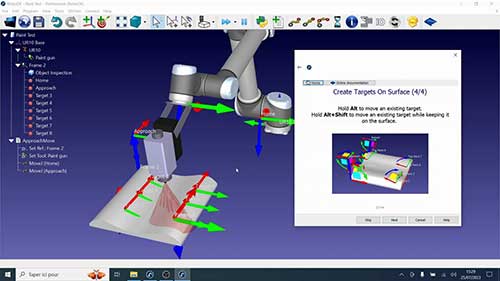
RoboDK仿真软件教程2
RoboDK支持各种类型的工业机器人和机器人品牌,用户可以选择并使用各种机器人模型。RoboDK还支持与CAD软件的集成,使用户能够直接从CAD软件中导入模型,并在RoboDK中生成机器人程序。
6轴高精度迷你机械臂
提起机械臂,大家可能经常会想到用于工业的大型机械臂,它们一般外形粗笨,价格昂贵,今天,我们给大家介绍一款小巧的,价格合理的桌面型六轴机械臂。
码垛和包装工业机器人
柯马为众多行业提供工业自动化系统,在今天的视频中,我们将看到码垛和包装的自动化过程。
ABB机器人焊接系统设计
WeldguideIV是一款强大的Thru-Arc跟踪传感器,基于专利技术,专为ABB机器人焊接系统设计。WeldguideIV旨在跟踪由铸件或其他预处理问题导致的焊接接头变化困难。
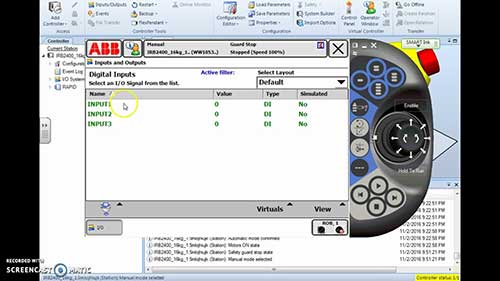
如何在示教器上模拟输入
这是一个关于如何在IRC5ABB示教器上模拟输入并激活输出的教学视频。
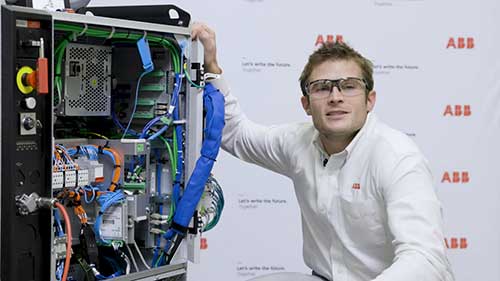
IRC5控制器:上级停止
ABB机器人上级停止SuperiorStop,具有与通用停止功能相同的功能,并且在控制器配置了功能安全软件包时使用。
发那科机器人编程培训 02 编写程序
演示如何在发那科机器人示教器上编写程序,使机器人能够拾取和放置物品。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问