导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1919 播放
收藏
片段保存及分享
播放有问题?
请戳这里
软体机器人制造
时长:5 分钟
类别:工业机器人技术
简介:有些软体机器人的抓取夹爪是带集成磁穹执行器的双向波纹管制成的,这段视频展示了这种双向波纹管的制造过程。
标签:
教学
工业机器人技术
机器人夹爪
相关视频:
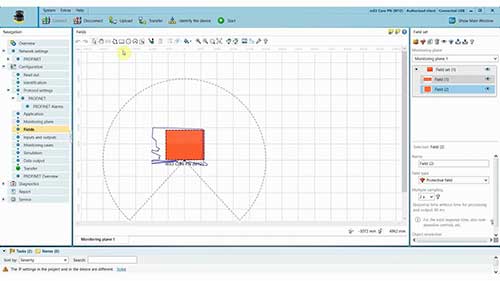
配置SWIFTI机器人安全区域
学习如何为ABB的SWIFT机器人在SICK软件中配置安全区域。
机器人传感器解决方案
西克(SICK)公司的工业传感器解决方案适用于工业机器人的各个领域,为工业机器人应用带来革新。
规划焊接机器人摆动轨迹
了解在FastARCCW与FANUCCRX-10iA焊接机器人上规划摆动轨迹的过程。
配置SafeMove安全系统1
SafeMove是新一代机器人安全系统,那么如何加载SafeMove模板以及如何使用封装呢。
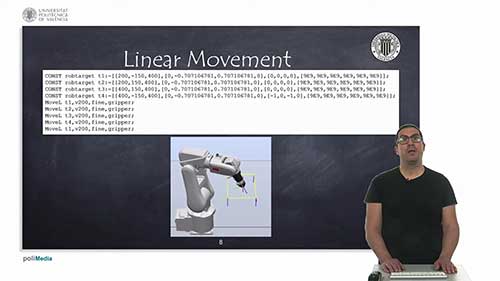
RAPID编程语言:运动指令
解释了如何在RAPID中使用运动指令,比如MoveAbsJ、MoveJ、MoveL和MoveC。RAPID是用于ABB机器人的编程语言。
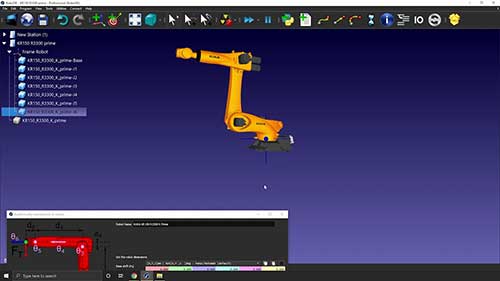
机器人点焊仿真与编程
点焊是需要使用机器人仿真软件的最常见任务之一。本指南将向你展示如何在RoboDK软件中模拟和编程机器人来自动点焊汽车车身。
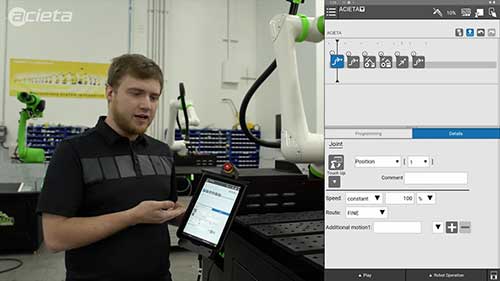
KRIONTEC工业机器人
库卡KRIONTEC是一款高度灵活的机器人,其工作范围在同类产品中最佳,并且适用于30至70公斤负载范围内的广泛应用,安装位置可灵活选择。
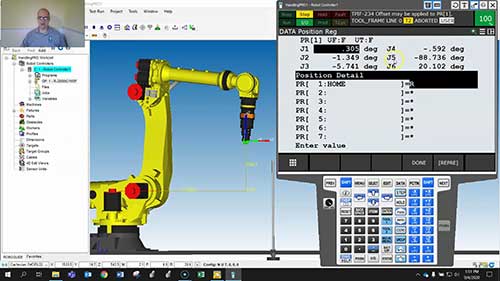
位置寄存器的工作原理
简要介绍发那科工业机器人编程中位置寄存器的工作原理,我们将着重讲解关节和笛卡尔坐标的表示方式。?
观看记录:




 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问