导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1758 播放
收藏
片段保存及分享
播放有问题?
请戳这里
香肠罐头码垛生产线
时长:2 分钟
类别:工业机器人技术
简介:在这家食品公司的工厂里,巴伐利亚香肠罐头的码垛工作是由库卡机器人完成的。
标签:
生产
工业机器人技术
码垛机器人
相关视频:
机器人传感器解决方案
西克(SICK)公司的工业传感器解决方案适用于工业机器人的各个领域,为工业机器人应用带来革新。
汽车车身侧面点焊
一起观看两个发那科点焊机器人协同工作,焊接汽车车身侧面。
机器人自动化组装桁架
汤米·伍兹描述了BFSVillaRica安装新自动化桁架生产线的工作情况。机器人在工作单元里拼接预装板并组装桁架。
配置SafeMove安全系统1
SafeMove是新一代机器人安全系统,那么如何加载SafeMove模板以及如何使用封装呢。
人工智能速成课程 20人工智能的未来
在人工智能课的最后一集,我们将展望人工智能的未来。AI是如何一路发展成现在这样的,以及未来它的发展方向又在哪里?会对我们的社会,生活产生怎样的影响。
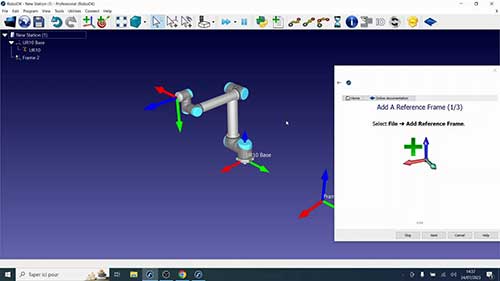
RoboDK仿真软件教程1
RoboDK是一种用于机器人程序生成和仿真的软件工具。它允许用户在虚拟环境中创建、模拟和验证机器人程序,然后将其转移到实际的机器人控制器中执行。
机器人弧焊离线编程
了解如何为Panasonic机器人进行弧焊离线编程。步骤1:使用适配器放置组件;步骤2:选择工具和基础框架;步骤3:创建Panasonic机器人焊接操作;步骤4:调整外部轴的位置。
RAPID编码控制ABB机器人拾放1
贾斯汀.卡莫拉解释了如何编写ABB机器人来执行拾取和放置任务。贾斯汀使用了Rapid编程语言和手动记忆工作对象的组合来编写机器人代码。
观看记录: