导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1751 播放
收藏
片段保存及分享
播放有问题?
请戳这里
iPhone工业机器人控制
时长:7 分钟
类别:工业机器人技术
简介:使用iPhone应用程序可以控制库卡KR6工业机器人,我们将了解如何在iPhone上编写程序,实现这种神奇的操作。
标签:
教学
工业机器人技术
工业机器人编程
相关视频:
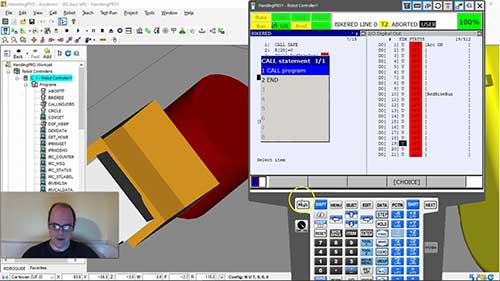
FANUC机器人编程3
简要介绍Fanuc机器人编程中调用、分支、I/O和寄存器指令的含义和使用方法。?
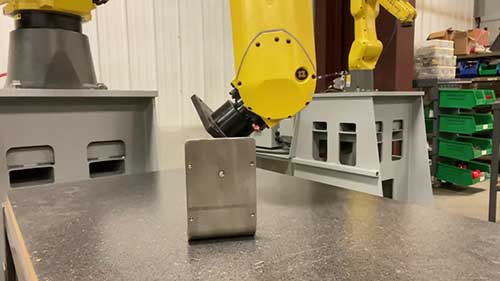
Fanuc机器人校准
我们将逐步介绍如何对由R30iB控制器控制的FanucM20iA机器人进行单位置校准和零点校准。
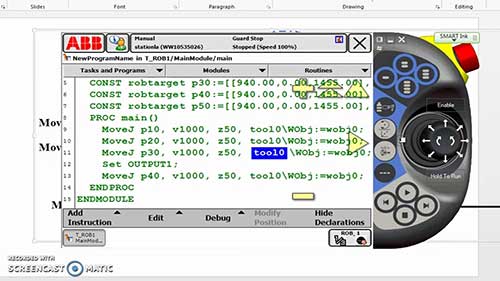
机器人编程:区域数据
介绍了机器人编程中的涉及到的区域数据、近似或连续运动。视频描述了在程序中使用区域的利弊以及我们需要注意的事项。
软体机器人制造
有些软体机器人的抓取夹爪是带集成磁穹执行器的双向波纹管制成的,这段视频展示了这种双向波纹管的制造过程。
操控机器人进行关节轴运动
工业机器人操作界面Jogging可用于手动状态下,用来操纵机器人。我将教你如何通过该界面手动操控机器人进行关节轴运动。
FANUC机器人编程入门
让零基础的学员,掌握FANUC机器人的编程指令和操作,对机器人操作与编程有基本了解。
安川机器人电弧焊单元1
紧凑型的ArcWorldRS电弧焊单元是灵活、节省空间和可靠的选择,可以快速将机器人集成到你的焊接工艺中。
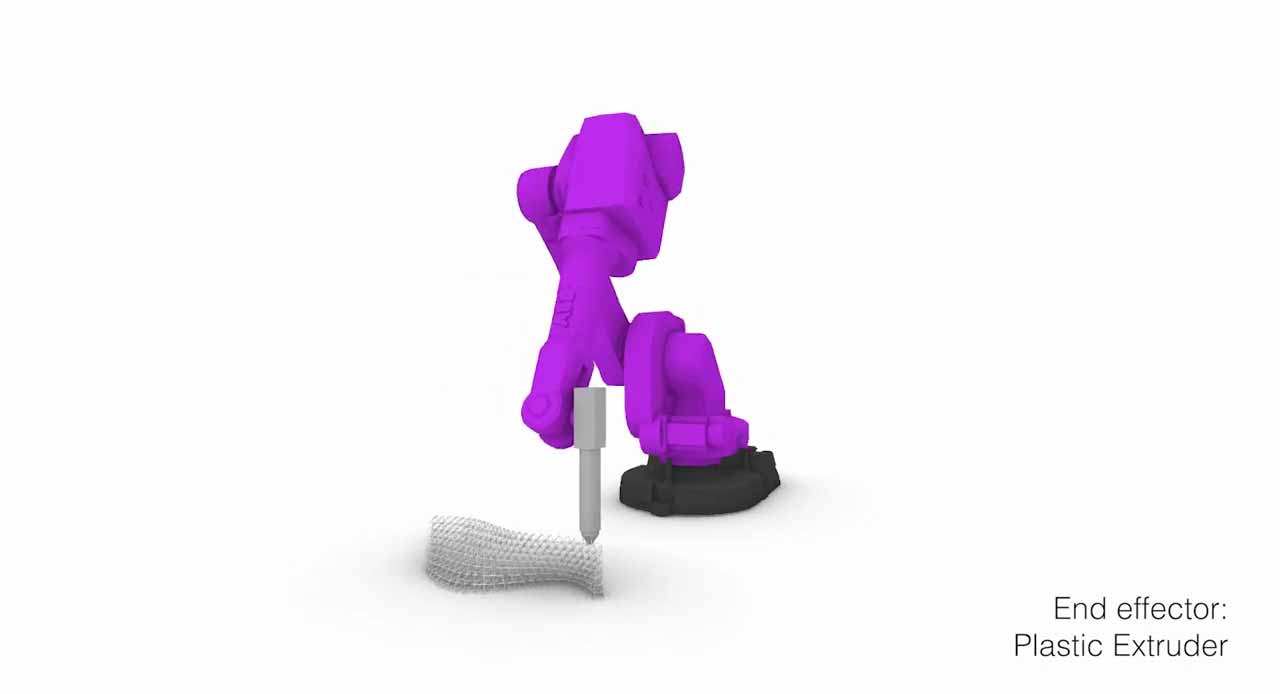
如何为工业机器人编程
将空间3D打印技术与工业机器人技术相结合,研究基于悬臂梁材料的体素化空间打印技术。我们将把该技术应用到一个表面,然后通过单一工具路径为工业机器人编程。
观看记录: