导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
265 播放
收藏
片段保存及分享
播放有问题?
请戳这里
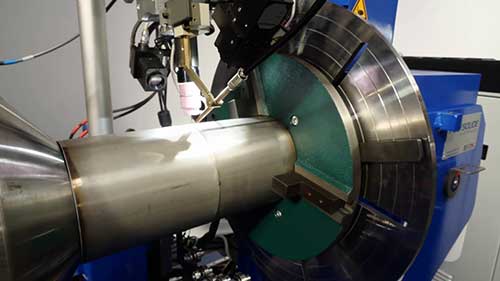
松下双机器人焊接系统
时长:5 分钟
类别:智能焊接技术
简介:松下双机器人焊接系统配备摩天轮定位器,用于于处理卡车零部件。松下双机器人调谐器解决方案确保了两个机器人之间的完美同步,并且使得编程变得非常简单。
标签:
教学
智能焊接
焊接自动化
相关视频:
IRCO自动化容器焊接系统
IRCO自动化容器焊接系统专门用于焊接常规容器或压力容器等大型工件。这种系统通常由机器人、焊接设备、控制系统和相关配件组成,旨在提高焊接过程的效率、精度和质量。
焊接变形解析1
对于防止焊接变形这点,很多人存在一个误解,即在焊接过程中需要让焊缝之间进行冷却以减少变形。本片将揭晓真相并探讨在处理焊接变形时的一些实用技巧。
自动埋弧焊焊接系统
本片展示了一个针对薄壁容器的全自动埋弧焊接系统,包括16x16寸的操纵装置和80吨转辊组合。
影响焊接热输入的因素
讨论了焊接行程速度,所用电流大小对热输入的影响。钢材焊件变色并不一定是出现了问题,但它是热输入大小的指示器。增加焊接行程速度可以减少热输入。
焊接工作原理
随着现代工艺的发展,焊接工艺也越来越趋向于自动化。那么你了解焊接工艺的原理吗?主要的焊接工艺又有哪些?看完视频后,你将会得到答案。
焊缝填充自适应控制系统
Miller焊接自动化公司销售经理布莱恩展示了该公司开发的机器人系统在一系列生产环境中进行自适应焊缝填充的功能。
宝利苏迪焊接车床系统
宝利苏迪焊接车床系统可以轻松适应各种圆形工件的应用。可配备TIG-GTAW冷丝、TIG-GTAW热丝或等离子焊接,自动车床式焊接系统非常适合精密焊接小到大的零部件。
电容式接近传感器的应用
电容式接近传感器是工业自动化和机器人技术中常用的传感器,用于检测物体的存在或不存在,而无需进行物理接触
观看记录: