导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
262 播放
收藏
片段保存及分享
播放有问题?
请戳这里
KUKA机器人安装过程
时长:2 分钟
类别:工业机器人技术
简介:Loop技术公司正在为研发目的建造一个复合材料制造演示单元。它配备了两台KUKATitan机器人,安装在12米长的轨道上。
标签:
教学
工业机器人
工业机器人操作
相关视频:
了解机器人离线编程
机器人离线编程(OLRP)使制造业中的机器人系统集成更加具有成本效益、易于部署和可扩展。通过在虚拟环境中编程工业机器人功能,制造商可以大大减少机器人停机时间,提高生产力和盈利能力。
最先进的五种军用机器人
军事机器人是指为了军事目的而研制的自动机器人,在未来战争中,自动机器人士兵以后成为对敌作战的军事行动的绝对主力。本视频中,我们将讨论5中最先进的军事机器人,其中一些要么已经在军队中服役,要么不久后会引入。看看它们有多先进吧。
五大工业机器人
随着机器人技术的不断发展,工业机器人已广泛应用于各行各业。在这里,我们将介绍ABB紧凑型机器人、KUKA小型六轴机器人、DAIHEN弧焊机器人等五款先进的工业机器人。
IRC5控制器:自动停止
IRC5是ABB机器人第5代控制器,这里介绍了关于IRC5控制器内的双通道安全电路自动停止功能。
Wizard简易编程软件
ABB机器人公司推出了Wizard简易编程软件,这款软件适用于IRB 1100工业机器人,用户可以在不需要专业编程技能的情况下,将机器人自动化引入生产线。
奔驰A级汽车生产线
在德国拉施塔特工厂,奔驰A级汽车的制造是完全自动化的。我们一起来看看这条生产线是如何工作的。
RobotStudio离线编程教程3
用户将学会如何在ABBRobotStudio中创建一个完整的机器人工作单元,这将为后续的离线编程、虚拟调试和优化工作奠定基础。
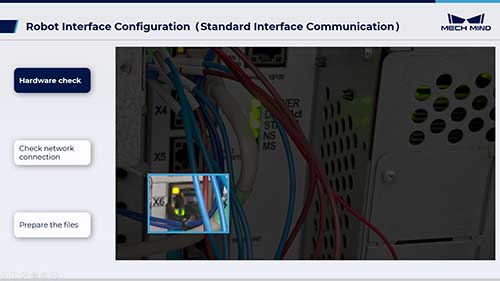
ABB机器人标准接口通信配置
本教程讲解了将程序文件加载到各种机器人中并使用不同的通信模式与机器人建立通信所需的操作步骤。这个视频演示了如何将程序文件加载到ABB机器人中,以建立机器人与Mech-Mind视觉系统之间的连接。
观看记录: