导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
244 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ELE机器人程序数据
时长:15 分钟
类别:工业机器人技术
简介:程序数据指的是在RobotStudio中编写的机器人程序数据。本节目介绍的是ELE140机器人程序数据。
标签:
教学
工业机器人
工业机器人操作
相关视频:
发那科机器人的世界坐标系
世界坐标系是被固定在空间上的标准直角坐标系,其被固定在由机器人事先确定的位置。Fanuc机器人的世界坐标系原点位置的大致标准是什么呢?收看节目了解如何给fanuc机器人设立世界坐标系。
安川迷你机器人弧焊单元
安川ArcWorldRSMini机器人弧焊单元正在CFTFI公司进行作业,该公司专门从事锅炉制造、机械焊接、切割和粉末涂层加工,让我们去看看该焊接单元有多么高效!
类人机器人的演化过程
类人机器人是现代的人形机器人,不仅外观像人,有人的模样,还能像人样活动,随着科技发展,有的类人机器人,不仅能运动,甚至自己去"想",会思考,有智慧,属于智能机器人一类。那么自类人机器人问世以来,它经历了哪些演变呢?收看我们的视频吧。
FANUC码垛机器人
FANUCM-20iD/35码垛机器人配备了SivikoPBXG夹具,可以处理十几种不同类型的箱子。
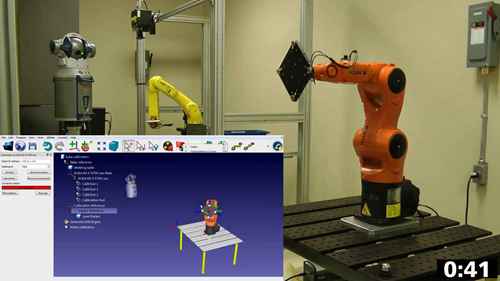
工业机器人校准
机器人校准是一个鉴定工业机器人运动学结构中的真实几何参数的过程。本节目演示了RoboDK分别通过Faro机器人跟踪仪与Creaform的C-Track双目相机测量仪实现机器人校准的过程。
协作机械臂自动化
通用机器人公司的协作机械臂可以简化和优化整个生产操作过程,轻松实现自动化。
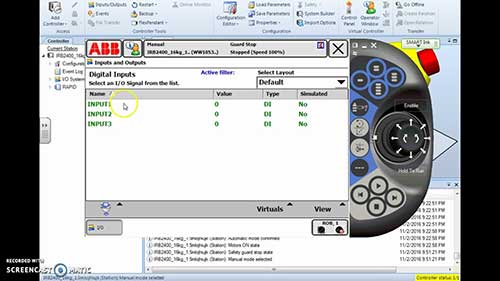
如何在示教器上模拟输入
这是一个关于如何在IRC5ABB示教器上模拟输入并激活输出的教学视频。
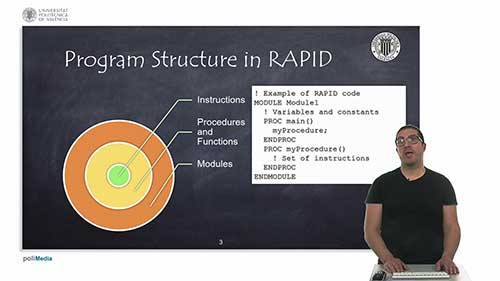
RAPID编程语言的基础知识
RAPID是一种用于编程ABB机器人的语言。本片介绍了一些关于RAPID编程语言的基础知识。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问