导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
185 播放
收藏
片段保存及分享
播放有问题?
请戳这里
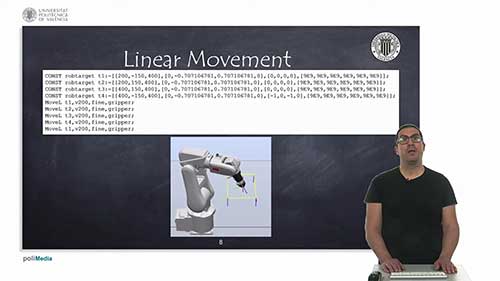
ABB机器人简易编程
时长:21 分钟
类别:工业机器人技术
简介:在ABBRobotStudio中使用ABBIRB120机器人,利用ABBRapid编程语言程序进行功能编程,让机器人执行拾取和放置动作。
标签:
教学
工业机器人
工业机器人编程
相关视频:
如何设定世界坐标系
在RobotStudio中创建虚拟工作站(带吊钩的焊接应用)需要大量的时间和精力。在这个视频中,您将了解工业机器人的世界坐标系是什么,以及如何使用它来移动您的机器人。
RAPID编程语言:运动指令
解释了如何在RAPID中使用运动指令,比如MoveAbsJ、MoveJ、MoveL和MoveC。RAPID是用于ABB机器人的编程语言。
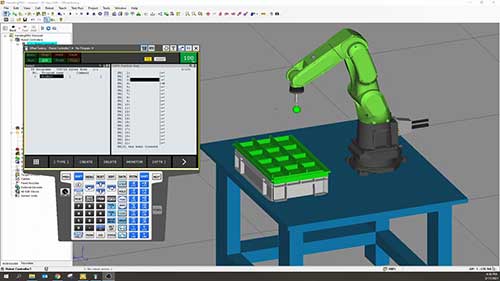
偏移量在优化代码中的作用
我们的FANUC绿色协作机器人CR-7向我们展示了偏移量在优化代码中的作用。
FANUC机器人搬运码垛系统
利用FANUC M-710iC/20L工业机器人与钳式臂端工具。StrongPoint自动化公司开发了一种桶搬运和转移系统。
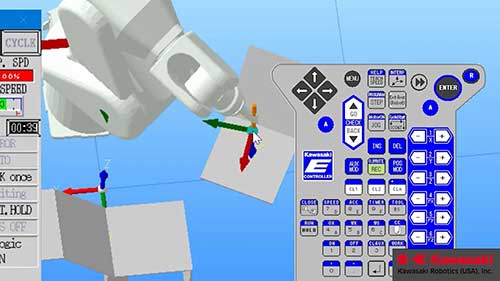
川崎机器人编程基础
展示了在基础模式坐标系统中自动操作(或手动操作)川崎机器人的各方面知识。
人工神经网络
该视频为神经网络的概念提供了一个有趣又令人兴奋的介绍。视频中,我们将学习神经网络中的不同层,并了解每层是如何处理数据的。我们将了解神经网络中使用的不同参数,如权重、偏差和激活函数等。
KUKA机器人离线编程软件
KUKA.Sim4.0适用于一般工业和汽车供应商的紧凑型可配置弧焊单元预组装并准备使用。通过KUKA.Sim,您可以在生产环境之外优化系统和机器人的运行。
安川紧凑型焊接工作单元
安川紧凑型焊接工作单元专为具有高产量生产需求的小型制造商设计,其具有安装简单、连接快速和焊接高效的特点。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问