导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
157 播放
收藏
片段保存及分享
播放有问题?
请戳这里
偏移量在优化代码中的作用
时长:28 分钟
类别:工业机器人技术
简介:我们的FANUC绿色协作机器人CR-7向我们展示了偏移量在优化代码中的作用。
标签:
教学
工业机器人
工业机器人编程
相关视频:
IRC5控制器:通用停止功能
ABB第五代机器人控制器IRC5始终受监控的通用停止功能,通常与光栅或地面扫描仪相连。
机器人焊接自动化
在汽车一级供应商领域,对速度的需求依然存在,并且表现良好。通过焊接机器人实现焊接自动化,大大提升了汽车组件的生产效率。
设计机器人夹爪
夹爪是机器人技术中常见的末端执行器,夹爪的设计是一个挑战。我们的机器人专家讲述了创建一个实用的高效的夹爪的关键。
工业机器人编程4
在进行正式的编程之前,就需要构建起必要的编程环境,机器人的工具数据和工件坐标系就需要在编程前进行定义。那么如何在Robotstudio软件中创建机器人工件坐标系?
偏移量在优化代码中的作用
我们的FANUC绿色协作机器人CR-7向我们展示了偏移量在优化代码中的作用。
FANUC机器人编程:偏移量
简单介绍了发那科机器人编程中偏移量的工作原理。
工业机器人的工作原理
在这期节目中,我们将学习机器人和机器人的工程原理。通过学习,我们会了解机器人是如何使用传感器来分析周围的环境,有时如何通过执行器来完成任务。
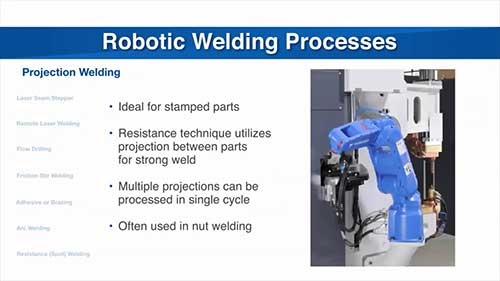
机器人焊接工艺介绍
作为机器人焊接领域的领导者,安川提供了各种热工艺解决方案,如:弧焊、点焊(电阻焊)、投影焊等工艺。
观看记录:




 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问