导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1685 播放
收藏
片段保存及分享
播放有问题?
请戳这里
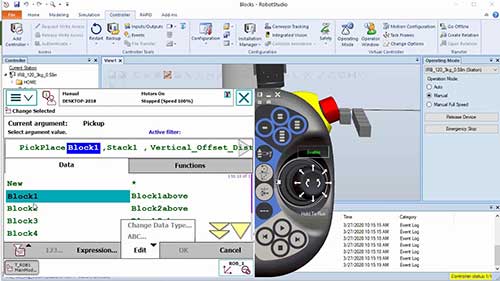
机器人码垛编程
时长:28 分钟
类别:工业机器人技术
简介:学习使用for循环创建一个模块程序,对工业机器人码垛装货、卸货进行编程。
标签:
教学
工业机器人技术
工业机器人编程
相关视频:
RobotStudio程序数据
程序数据在RobotStudio中被用于创建、调试和优化机器人应用程序,以确保机器人在实际工作中能够高效、安全地执行任务。
机器人码垛编程
学习使用for循环创建一个模块程序,对工业机器人码垛装货、卸货进行编程。
建造机器人夹爪
机器人专家詹姆斯·布鲁顿想做一个受力控制的机器人手臂。首先,他需要制造一个机器人夹爪。一起来看看这个机器人夹爪是如何制作的。
KUKA自动化金属电弧焊系统
KUKA的自动化气体金属电弧焊系统用于制造大众Amarok等皮卡车所需的极其坚固的梯架。
发那科机器人编程培训 04 打开和关闭夹爪
如何在示教器上编写打开和关闭机器人夹爪的程序?本期机器人编程课程将逐步演示编程步骤。
川崎机器人触摸感应功能
触摸感应涉及通过确定焊接工件的位移来找到位移矢量,方法是通过测量点的位置并将其与软件中存储的值进行比较。机器人可按照给定的模式在几个点上触摸要测量的物体。
FANUC机器人定预防性维护2
Acieta的机器人系统工程师克里斯解释了如何在FANUCM-10iA、M-20iA机器人上正确添加润滑脂和油,并更换电池的步骤。
ABB机器人维护
ABB机器人的全球服务支持和预防性维护可以确保客户现场的生产力和资产价值。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问