导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
188 播放
收藏
片段保存及分享
播放有问题?
请戳这里
IRC5控制器:SmarTac程序
时长:8 分钟
类别:工业机器人技术
简介:ABB机器人SmarTac程序,可以显著降低夹具成本并减少编程停机时间。
标签:
教学
工业机器人
工业机器人控制器
相关视频:
IRC5控制器:自动停止
IRC5是ABB机器人第5代控制器,这里介绍了关于IRC5控制器内的双通道安全电路自动停止功能。
机器人搅拌摩擦焊接单元
视频展示了新的模块化cell4_FSW搅拌摩擦焊接单元,其中机器人程序的创建和虚拟调试通过模拟软件KUKA.Sim4.0来实现。
偏移量在优化代码中的作用
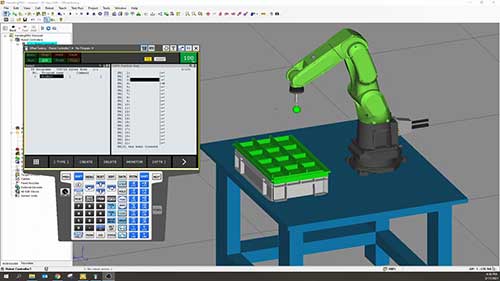
我们的FANUC绿色协作机器人CR-7向我们展示了偏移量在优化代码中的作用。
如何更换协作机器人电池
该片详细介绍了如何更换发那科CRX协作机器人的电池。
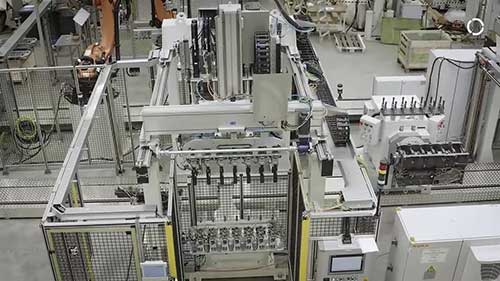
机器人自动化装配发动机
KUKA与斯堪尼亚一起实施了公司迄今为止最现代化的自动化工业机器人发动机装配线,从而为新一代商用车发动机奠定了基础。
软体机器人夹爪
吉姆·马提斯现场演示使用软体机器人夹爪抓取各种物体,讲述了这种技术的多功能性和适应性。
人工智能速成课程 7自然语言处理
今天,我们将讨论自然语言处理,或称NLP,向你们展示一些计算机可以用来更好地理解语言的策略,比如分布语义,然后我们将向你们介绍一种简称为RNN的神经网络——递归神经网络,来构建句子。
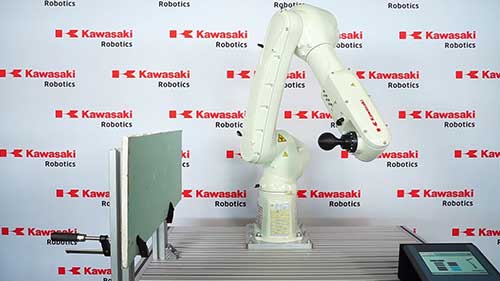
川崎机器人碰撞检测功能
碰撞检测功能非常适合需要用到工业机器人夹具的应用,特别是当安装的夹爪暴露于受损零件或机器人操作易碎工件时
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问