导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
225 播放
收藏
片段保存及分享
播放有问题?
请戳这里
IRC5控制器:焊接电源
时长:6 分钟
类别:工业机器人技术
简介:想知道如何轻松将焊接电源集成到IRC5机器人控制器中吗?
标签:
教学
工业机器人
工业机器人控制器
相关视频:
ABB机器人——纸箱码垛生产线
乔治威斯顿食品有限公司拥有澳大利亚最大的机器人码垛系统,该纸箱码垛生产线拥有17台ABB机器人,包括16台码垛机。
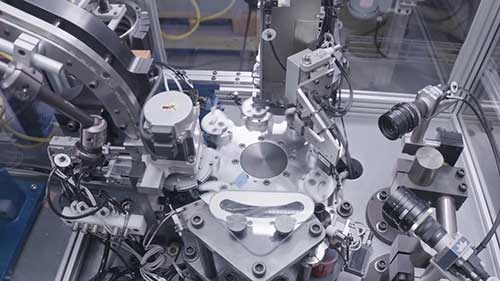
装配自动化与检验
这台机器专为自动组装阀体和橡胶头设计,一起来看看自动装配和检测过程。
工业机器人编程简析
了解工业机器人的不同编程方法以及工业机器人的主要编程语言。
安川点焊机器人编程技术
安川点焊机器人是机器人焊接领域的佼佼者,我们将学习安川点焊机器人的基本编程技术,主要内容包括示教器概述、协作系统等。
ABB工具数据
工具数据对于机器人的运动规划、路径生成和任务执行非常重要,它们需要被准确地输入到机器人控制系统中,以确保机器人能够准确地执行任务并且符合安全标准。
配置SafeMove安全系统1
SafeMove是新一代机器人安全系统,那么如何加载SafeMove模板以及如何使用封装呢。
机器人搅拌摩擦焊接单元
视频展示了新的模块化cell4_FSW搅拌摩擦焊接单元,其中机器人程序的创建和虚拟调试通过模拟软件KUKA.Sim4.0来实现。
三点法设置工具坐标系
本片简要介绍如何使用三点法来设置发那科工业机器人的工具坐标系。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问