导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
169 播放
收藏
片段保存及分享
播放有问题?
请戳这里
多线机器人箱子码垛系统
时长:4 分钟
类别:工业机器人技术
简介:FANUC美国授权系统集成商Sen-Pack开发了这个箱子码垛系统,使用了三台FANUC托盘堆垛机器人为九条生产线提供服务。每台FANUCM-410iC/185托盘堆垛机器人及其相关的传送装置构成了迷你单元,可以在整体较大的单元内独立运行。
标签:
教学
工业机器人
工业机器人应用
相关视频:
自动化生产线解决方案
这是一条自动化交钥匙工程项目,由9个连接单元组成,包括27台机器和9个用于钢铁重型卡车车轮的发那科机器人。
AGV和机器人码垛系统
AGV是自动导引运输车的意思。GV是装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。码垛机器人能适应于纸箱、袋装、罐装、箱体、瓶装等各种形状的包装成品码垛作业,本视频重点讨论了AGV和机器人码垛系统。
ELE机器人程序数据
程序数据指的是在RobotStudio中编写的机器人程序数据。本节目介绍的是ELE140机器人程序数据。
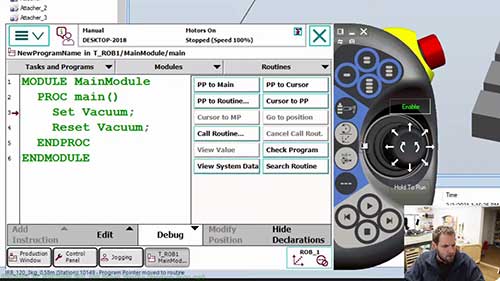
RAPID编码控制ABB机器人拾放1
贾斯汀.卡莫拉解释了如何编写ABB机器人来执行拾取和放置任务。贾斯汀使用了Rapid编程语言和手动记忆工作对象的组合来编写机器人代码。
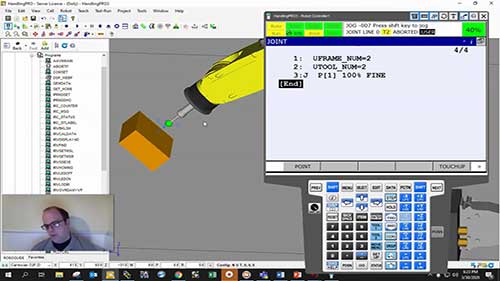
创建FANUC机器人工作指令
发那科fanuc机器人怎么创建动作指令?我们将以关节运动和笛卡尔运动来讲解。
Wizard简易编程软件
ABB机器人公司推出了Wizard简易编程软件,这款软件适用于IRB 1100工业机器人,用户可以在不需要专业编程技能的情况下,将机器人自动化引入生产线。
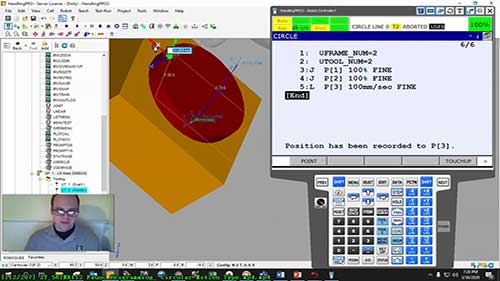
FANUC机器人编程1
简要介绍如何编程控制发那科机器人进行圆周运动。
饮料瓶自动化生产线
FANUC开发了一款自动化饮料瓶输送系统,利用6个M-710iC/50H机器人将饮料瓶从运货板上移除,并将其放到传送带上。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问