导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
243 播放
收藏
片段保存及分享
播放有问题?
请戳这里
ABB涂装机器人的调试
时长:3 分钟
类别:工业机器人技术
简介:我们在机器人安装现场进行了预调试工作。这样现场机器人的安装和调试将会更加高效,并且能够显著降低成本。
标签:
教学
工业机器人
工业机器人应用
相关视频:
安川机器人电弧焊单元2
模块化的ArcWorldCS焊接单元灵活、节省空间,可以快速将机器人集成到焊接工艺中。CS系列有多种不同型号可供选择,包括单臂或双臂机器人,以及固定、倾斜或倾斜和旋转的工作台选项。
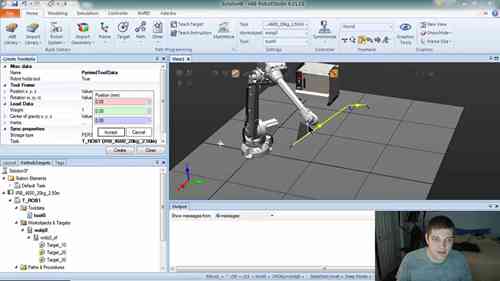
如何设定世界坐标系
在RobotStudio中创建虚拟工作站(带吊钩的焊接应用)需要大量的时间和精力。在这个视频中,您将了解工业机器人的世界坐标系是什么,以及如何使用它来移动您的机器人。
模糊逻辑设计和模糊控制概论
您可能已经知道,计算机只能处理包含0和1的二进制格式的信息。这意味着如果你想和计算机交流,你需要学习代码。此外,您编写的程序稍后将被转换为硬件级代码,机器可以理解这些代码,因为它只包含0和1。虽然二进制系统对于机器来说是完美的,但是对于人类来说却很不方便。而使用模糊系统则不需要一个中间系统来转换这些变量。这就是我们要学习模糊逻辑的原因,因为它让我们与机器的沟通更方便。
IRC5控制器:上级停止
ABB机器人上级停止SuperiorStop,具有与通用停止功能相同的功能,并且在控制器配置了功能安全软件包时使用。
人工智能速成课程 11机器人技术
机器人是为非常特殊的任务而设计的,比如清扫我们的家园,在工厂装配汽车,或者探索其他星球的表面。所以机器人非常重要,今天,我们来看看人工智能在克服机器人领域的三个关键挑战定位、规划和操作中,所扮演的角色。
工业机器人编程3
工具座标系是机器人运动的基准。那么如何为ABB机器人设定工具坐标系呢?下面让我们看教程了解。
Acieta协作机器人编程
Acieta推出FastLoadCX1000可扩展协作机器人,查看FastLOADCX1000可扩展单元上提供的控制机器人进行拖放运动的编程教程。
操控机器人进行关节轴运动
工业机器人操作界面Jogging可用于手动状态下,用来操纵机器人。我将教你如何通过该界面手动操控机器人进行关节轴运动。
观看记录: