导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
286 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人焊接技术
时长:6 分钟
类别:工业机器人技术
简介:DesignPro是一家领先的公司,专注于开发和推广先进的机器人焊接技术。他们的焊接解决方案利用最新的自动化和机器人技术,为客户提供高效、精确和可靠的焊接解决方案。
标签:
教学
工业机器人
工业机器人应用
相关视频:
发那科机器人的世界坐标系
世界坐标系是被固定在空间上的标准直角坐标系,其被固定在由机器人事先确定的位置。Fanuc机器人的世界坐标系原点位置的大致标准是什么呢?收看节目了解如何给fanuc机器人设立世界坐标系。
距离机器人取代人类还有多远
伴随机器人流程自动化技术,机器人领域变革时机的日臻成熟,今后会有更多的工作将会自动化。机器人流程自动化技术在给人们带来高效快捷工作体验的同时,也引起了“人类能否被机器人取代”这一自带焦虑感的话题。机器人会抢走人类的工作吗?
RoboDK仿真软件教程2
RoboDK支持各种类型的工业机器人和机器人品牌,用户可以选择并使用各种机器人模型。RoboDK还支持与CAD软件的集成,使用户能够直接从CAD软件中导入模型,并在RoboDK中生成机器人程序。
KRIONTEC工业机器人
库卡KRIONTEC是一款高度灵活的机器人,其工作范围在同类产品中最佳,并且适用于30至70公斤负载范围内的广泛应用,安装位置可灵活选择。
机器人的类型
工业机器人广泛应用于制造业,尤以汽车制造业最为常见。本视频介绍了不同种类的工业机器人。
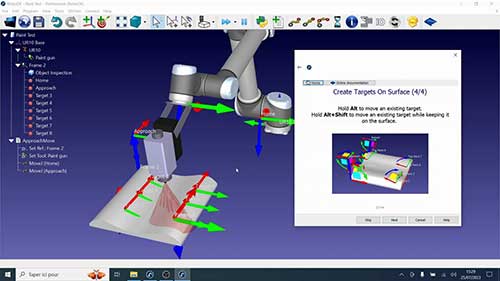
机器人弧焊离线编程
了解如何为Panasonic机器人进行弧焊离线编程。步骤1:使用适配器放置组件;步骤2:选择工具和基础框架;步骤3:创建Panasonic机器人焊接操作;步骤4:调整外部轴的位置。
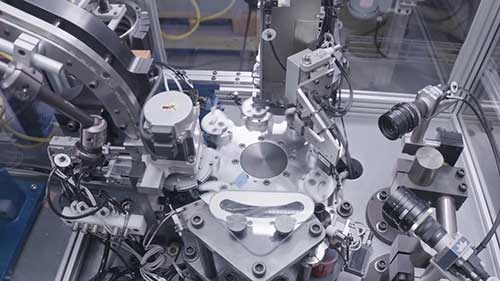
装配自动化与检验
这台机器专为自动组装阀体和橡胶头设计,一起来看看自动装配和检测过程。
奔驰A级汽车生产线
在德国拉施塔特工厂,奔驰A级汽车的制造是完全自动化的。我们一起来看看这条生产线是如何工作的。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问