导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
175 播放
收藏
片段保存及分享
播放有问题?
请戳这里
工业机器人的维护
时长:2 分钟
类别:工业机器人技术
简介:工业机器人服务是指为工业机器人提供的各种支持和维护服务。包括安装和调试,维护和保养,培训,故障排除和修理等。
标签:
教学
工业机器人
工业机器人维护
相关视频:
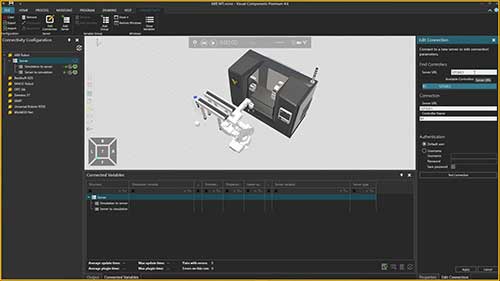
ABB机器人连接插件功能
学习如何将机器人程序处理为ABB的RAPID语言,并使用虚拟组件的连接插件功能在ABBRobotStudio上的虚拟控制器上运行代码。
食物机器人如何改变生活
人工智能和自动化无处不在,就连我们的农田和厨房里都已经有了它们的身影。机器人将如何改变我们的种植、收货和烹饪方式呢?
建造机器人夹爪
机器人专家詹姆斯·布鲁顿想做一个受力控制的机器人手臂。首先,他需要制造一个机器人夹爪。一起来看看这个机器人夹爪是如何制作的。
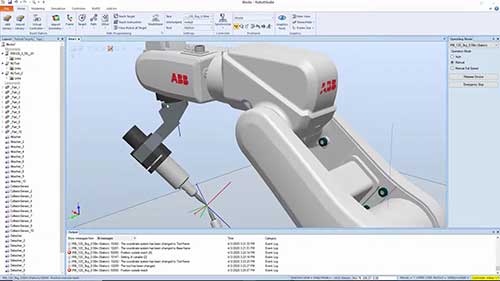
ABB工具数据
工具数据对于机器人的运动规划、路径生成和任务执行非常重要,它们需要被准确地输入到机器人控制系统中,以确保机器人能够准确地执行任务并且符合安全标准。
VUDU工业机器人编程系统
VUDU系统能令机器人编程新手也能在很短的时间内对工业机器人进行编程。用户可以轻松对各种高精度工业机器人进行编程。
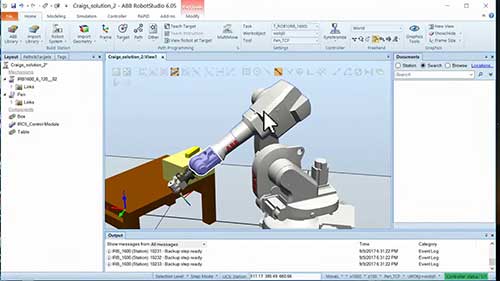
RobotStudio离线编程教程10
ABBRobotStudio教程将介绍如何在ABBRobotStudio中使用焊接工具。
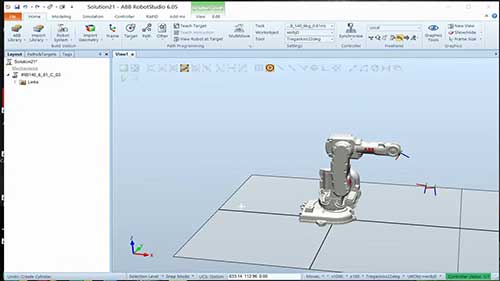
RobotStudio离线编程教程4
学习如何在ABBRobotStudio环境中让机器人在虚拟环境中移动。
无刷电机机器人关节
无刷电机为机器人手臂提供更高的功率重量比,在这个视频中,我们将看到如何为这种机械臂组装机器人关节。
观看记录: