导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1806 播放
收藏
片段保存及分享
播放有问题?
请戳这里
模糊逻辑控制器1
时长:4 分钟
类别:无人机应用技术
简介:本视频介绍了基于SVUGM型号的无人机进行稳定飞行的模糊逻辑控制器技术。
标签:
教学
无人机应用
模糊逻辑
相关视频:
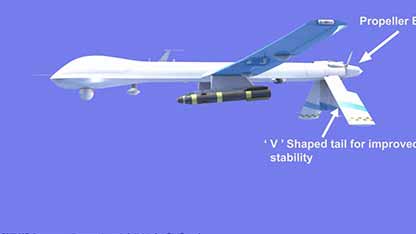
固定翼无人机五大优点
固定翼无人机,机翼外端后掠角可随速度自动或手动调整的机翼固定的一类无人机。因其优良的功能、模块化集成,现已广泛应用在测绘、地质、石油、农林等职业,具有广阔的市场应用远景。若要购买无人机,那么固定翼无人机无疑是个好选择,本视频列举了固定翼无人机的五项优点。
无人机的发展应用
无人机已经存在了25年,早先只用于空中侦察,而现在越来越多地投入了军事作战当中,一些专家预言:“未来的空战,将是具有隐身特性的无人驾驶飞行器与防空武器之间的作战。”这个主题就是本视频要讨论的重点,无人机的发展和在现代战争中的应用。
什么是空气动力学阻力
在前面的课程中我们已经学习了关于无人机的空气动力学基础知识,大家应该已经有所了解,空气对物体的作用力在垂直于来流方向的分力体现为升力,其是使物体离开地面的作用力。而在平行于来流方向的分力体现为阻力,其对物体在空气中运动起阻力作用。这一集中我们的讨论重点是空气动力学阻力。
垂直起降无人机燃气发动机测试2
视频中的这款垂直起降无人机发动机VolJetVT10G,搭载汽油双缸发动机DLE60。最大飞行距离-350公里巡航速度-88公里/小时,飞行时间-4小时,无载荷起飞重量-19.8公斤,最大起飞重量25.5公斤,油箱-4L,电池-10Ah。
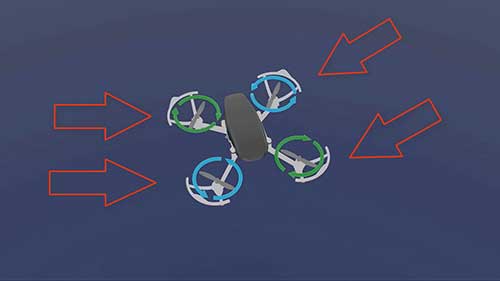
如何控制无人机翻滚?
四轴无人机一般都可以翻滚,如何设置参数以及控制无人机翻滚是本视频将要讲述的内容。
农业无人机的维护方法1
保养维护可以延长农业植保无人机的使用寿命。那么我们在日常生活中应该如何对农业植保无人机进行维护保养呢?农业无人机维护系列节目的第一集为你演示了喷嘴、喷嘴尖头和喷嘴座的更换方法。
载重120公斤的重型无人机
AURA100作为一款有效载荷可达120公斤的无人机在后勤、搜索和救援、长途监视、农业、勘探等领域都有较广泛的应用。
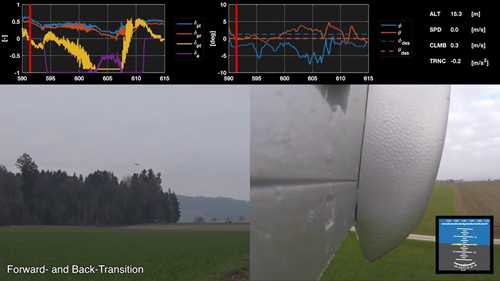
垂直起降倾斜翼无人机的姿态控制
垂直起降,续航时间长。垂直起降固定翼无人机结合了固定翼和多旋翼无人机的优势,不需要跑道即可垂直起降,节目测试了这款无人机的飞行姿态控制系统。
观看记录: