导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1740 播放
收藏
片段保存及分享
播放有问题?
请戳这里
混合动力无人机发电机
时长:28 分钟
类别:无人机应用技术
简介:也许你会操作无人机,但你了解无人机系统的组成吗?这一集节目我们将深入讨论无人机机载辅助电源系统的设计。
标签:
教学
无人机应用
UAV
动力系统
相关视频:
模糊逻辑控制器1
本视频介绍了基于SVUGM型号的无人机进行稳定飞行的模糊逻辑控制器技术。
如何控制无人机俯仰角?
无人机俯仰角是指机体轴(沿机头方向)与地平面(水平面)之间的夹角,本视频介绍如何控制无人机俯仰角。
无人机有效载荷
携带有效载荷是使用无人机系统的主要原因,而且有效载荷通常是无人机系统比较昂贵的子系统,本视频展示了如何把我们称为有效载荷的设备放在一起,以适应我们的无人机机头的有限空间。
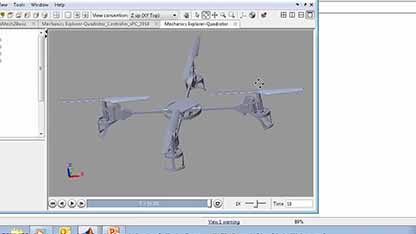
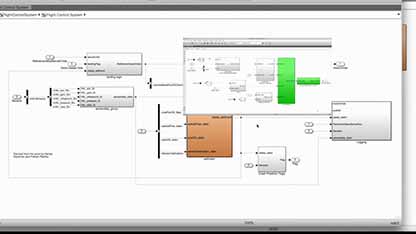
四旋翼飞行器的建模仿真和控制
在本次教学课程中,MathWorks技术人员雷恩·戈登以四旋翼飞行器为例,演示了在Simulink®及SimMechanics™中建模仿真及控制的过程,包括:从三维CAD环境中导入四旋翼飞行器模型,并自动转换为SimMechanics模型描述,SimMechanics模型的修正,四旋翼飞行器控制系统的设计。
“凤凰”无人机
日前,英国成功试飞了第一架由可变浮力驱动的大型飞行器—凤凰,该飞行器长15米,翼展10.5米,其工作原理如下:在飞行期间一半时间属于轻于空气的航空器,另一半时间属于重于空气的航空器,这两个状态之间的重复转换为其提供了动力源。基于这项技术的飞行器可以用作伪卫星,并为电信活动提供更廉价的选择。
无人机装配流程
Saqr-2是沙特开发的一种固定翼无人机,这里以动画的形式呈现了Saqr-2无人机的装配过程。
PD-1固定翼无人机
PD-1无人机是一种轻型、复合式无人机。它能在空中停留长达10小时,模块化设计的特点,使得这款无人机可以根据客户的需要实现轻松定制。
无人机飞行模拟系统与控制3
在上一个视频中,我们搭建了一个控制系统构架,本集我们将利用这个构架给无人机编程并创建一个四旋翼无人机飞行软件。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问