导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1666 播放
收藏
片段保存及分享
播放有问题?
请戳这里
令人惊奇的机械臂
时长:12 分钟
类别:工业机器人技术
简介:KUKA、FESTO、DENSO是全球知名的机器人公司,一起来看看他们研发的五款令人惊叹的工业机械臂。
标签:
教学
工业机器人技术
机械臂
相关视频:
工业机器人的应用扩展
了解关于工业机器人的一些扩展应用,包括MXC5工具更换器、QS7碰撞传感器和机器人的气动夹具以及智能抓夹等。这些产品可以用于Nachi机器人。
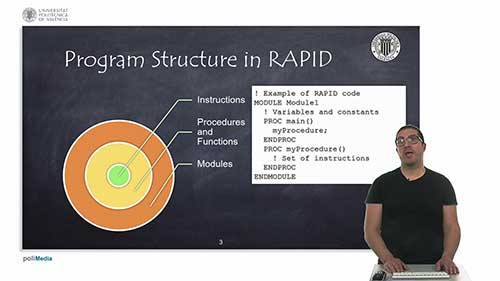
RAPID编程语言的基础知识
RAPID是一种用于编程ABB机器人的语言。本片介绍了一些关于RAPID编程语言的基础知识。
ABB机器人:铸造应用
现代铸造厂不断寻求提高效率、增加灵活性和改善工作场所安全的方法。这部影片展示了ABB机器人在铸造领域的应用。
人工智能速成课程 4让AI读懂你的手写内容
我们将在实验室里设计一个神经网络来识别手写字母,将机器人约翰手写的字母转换成机打文本。为此,我们将导入一个名为EMNIST的标记数据集,使用一个名为SKLearn的预先编写的库来构建网络,然后调整我们的代码,直到它变得准确,然后我们将使用新训练的神经网络将机器人约翰手抄页转换成机打文本。
用示教器操作SWIFTI机器人
使用Flexpendant示教器可以以各种方式安全而精确地移动SWIFTIcobot。观看视频,了解使用Flexpendant示教器操作机器人的全部功能。
ABB机器人——运动控制
卓越的运动控制是ABB工业机器人的标志。在这段视频中,我们将看到ABB机器人绕着芬达易拉罐演示高速协作同步。
使用RoboDK设定坐标系
展示了如何使用RoboDKTwinTrack设定坐标系。RoboDKTwinTrack允许用户通过示教器来编程机器人。
IRC5控制器:自动停止
IRC5是ABB机器人第5代控制器,这里介绍了关于IRC5控制器内的双通道安全电路自动停止功能。
观看记录: