导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
188 播放
收藏
片段保存及分享
播放有问题?
请戳这里
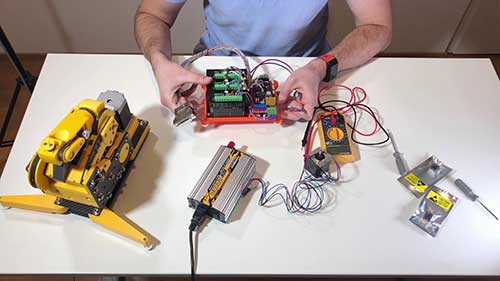
使用RoboDK设定坐标系
时长:2 分钟
类别:工业机器人技术
简介:展示了如何使用RoboDKTwinTrack设定坐标系。RoboDKTwinTrack允许用户通过示教器来编程机器人。
标签:
教学
工业机器人
工业机器人编程
相关视频:
工业机器人编程——机器人系统
了解工业机器人编程的基础知识,学习工业机器人的主要编程语言以及不同的编程方法。
IRC5控制器:自动停止
IRC5是ABB机器人第5代控制器,这里介绍了关于IRC5控制器内的双通道安全电路自动停止功能。
安川迷你机器人弧焊单元
安川ArcWorldRSMini机器人弧焊单元正在CFTFI公司进行作业,该公司专门从事锅炉制造、机械焊接、切割和粉末涂层加工,让我们去看看该焊接单元有多么高效!
协作机械臂自动化
通用机器人公司的协作机械臂可以简化和优化整个生产操作过程,轻松实现自动化。
六自由度机械臂 05
各种零部件组装完成以后,这个机械臂终于能动了。我们将它与步进电机驱动器连接在一起,观察它的运动。
AGV和机器人码垛系统
AGV是自动导引运输车的意思。GV是装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。码垛机器人能适应于纸箱、袋装、罐装、箱体、瓶装等各种形状的包装成品码垛作业,本视频重点讨论了AGV和机器人码垛系统。
配置ABB安全可扩展I/O
ABB标准I/O板是ABB工业机器人最常使用的一种接口方式,其本质为一种可编程控制器(PLC);本片讲解了如何配置ABB安全可扩展I/O。
人工智能速成课程 9强化学习
当我们想要训练人工智能,使其拥有某些我们自己都不完全了解的技能时,强化学习尤其有用。与我们目前讨论过的一些技术不同,强化学习一般只关注人工智能完成任务后如何执行任务。当一个人工智能完成了这项任务,相处何时以及如何奖励一个人工智能的方法,称为学分分配,这也是强化学习中最困难的部分之一。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问