导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1811 播放
收藏
片段保存及分享
播放有问题?
请戳这里
五款桌面级机械臂
时长:13 分钟
类别:工业机器人技术
简介:随着机器人技术的兴起,机械臂已经不仅仅只限于工业场景的应用了,这段视频即将展示的五款精致小巧的桌面型机械臂将给人们的生活和工作带来便利。
标签:
教学
工业机器人技术
机械臂
相关视频:
工业机器人编程简析
了解工业机器人的不同编程方法以及工业机器人的主要编程语言。
多个机器人工作站的连接
由于机器人工作站平台的模块化架构,多个机器人工作站可以轻松灵活地相互连接。
Acieta协作机器人的设置
Acieta的杰克·康宁演示了如何设置FastLOADCX1000三指自适应机器人夹持器。
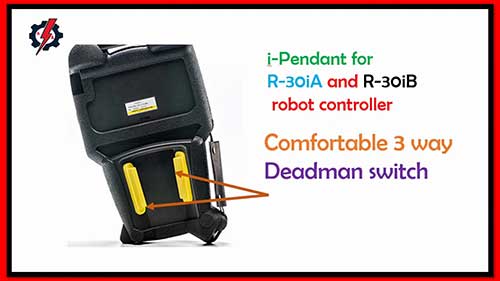
发那科机器人编程培训 01 示教器
示教器是一种可用于远程控制机器人的装置。今天,我们将了解发那科机器人示教器上的各个按钮及其功能。
西雅特汽车生产线
在西雅特的机器人强化金属车间,2000个工业机器人与1700名员工同步工作,每68秒制造出一辆新汽车。
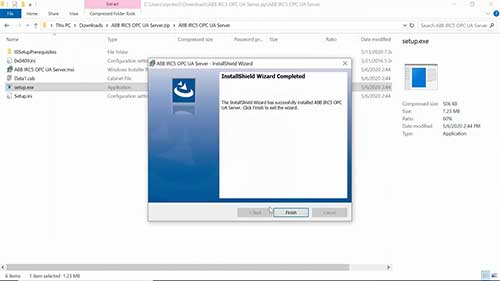
如何使用OPCUA服务器
学习如何使用IRC5OPCUA服务器。它将提供有关下载和安装服务器的说明。收看节目学习配置机器人控制器并使用IRC5OPCUA配置工具与机器人连接。
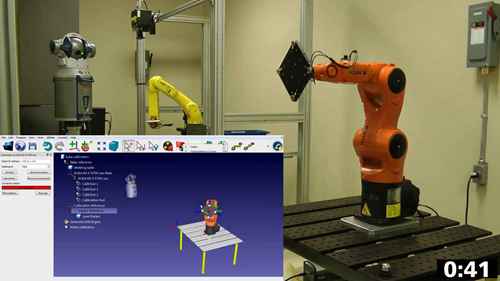
工业机器人校准
机器人校准是一个鉴定工业机器人运动学结构中的真实几何参数的过程。本节目演示了RoboDK分别通过Faro机器人跟踪仪与Creaform的C-Track双目相机测量仪实现机器人校准的过程。
机器人弧焊离线编程
了解如何为Panasonic机器人进行弧焊离线编程。步骤1:使用适配器放置组件;步骤2:选择工具和基础框架;步骤3:创建Panasonic机器人焊接操作;步骤4:调整外部轴的位置。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问