导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
263 播放
收藏
片段保存及分享
播放有问题?
请戳这里
如何更换FANUC机器人电池
时长:2 分钟
类别:工业机器人技术
简介:ANCA公司使用Fanuc200iD和M20iA机器人进行自动化解决方案。ANCA的售后培训经理斯蒂芬介绍了为工业机器人更换电池的过程。
标签:
教学
工业机器人
工业机器人维护
相关视频:
川崎机器人维护服务
川崎机器人基于条件的维护(CBM)是一种积极的维护方法,它依赖于监测机器人及其组件的实际状态,以确定何时进行维护。
RAPID编码控制ABB机器人拾放1
贾斯汀.卡莫拉解释了如何编写ABB机器人来执行拾取和放置任务。贾斯汀使用了Rapid编程语言和手动记忆工作对象的组合来编写机器人代码。
机器人自动化装配发动机
KUKA与斯堪尼亚一起实施了公司迄今为止最现代化的自动化工业机器人发动机装配线,从而为新一代商用车发动机奠定了基础。
多线机器人码垛系统
FANUCAmerica授权系统集成商StrongPointAutomation开发了这个机器人系统,利用两台FANUCM-410iC/185装载机器人和伺服驱动的末端执行工具,将来自三条生产线的产品进行托盘码垛。
FANUC机器人的零点复归
通常FANUC机器人出厂时都已经进行了零点复归,但有时会出现丢失零点数据的情况,这时就需要重新进行零点复归,这也是本节课程要讲的主题。
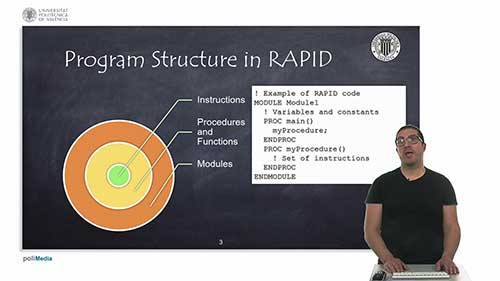
RAPID编程语言的基础知识
RAPID是一种用于编程ABB机器人的语言。本片介绍了一些关于RAPID编程语言的基础知识。
人工智能和机器人技术
当你在听音乐的时候,看电视剧的时候,设备上的软件总能推送符合你喜好的推荐,它们是怎么做到的呢?没错就是AI技术。本段视频的重点就是介绍人工智能和机器人技术。
机器人焊接自动化
在汽车一级供应商领域,对速度的需求依然存在,并且表现良好。通过焊接机器人实现焊接自动化,大大提升了汽车组件的生产效率。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问