导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
223 播放
收藏
片段保存及分享
播放有问题?
请戳这里
川崎机器人维护服务
时长:6 分钟
类别:工业机器人技术
简介:川崎机器人基于条件的维护(CBM)是一种积极的维护方法,它依赖于监测机器人及其组件的实际状态,以确定何时进行维护。
标签:
教学
工业机器人
工业机器人维护
相关视频:
电弧焊机器人的安装过程
该片展示了VanLierop(一家通用分包公司)的柔性电弧焊机器人安装过程。
人工智能速成课程 概论
欢迎来到人工智能速成课程,在本系列节目中,主持人贾布尔·阿西娅将通过追溯人工智能的历史并研究其应用,向我们揭示隐藏在人工智能背后的秘密。
机器人管件搬运系统
KUKA合作伙伴ARCSpecialties开发并集成了这个机器人管件搬运系统。这个机器人系统降低了金属管件的搬运成本并增加了产出。
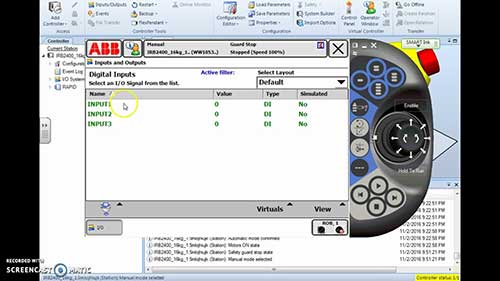
如何在示教器上模拟输入
这是一个关于如何在IRC5ABB示教器上模拟输入并激活输出的教学视频。
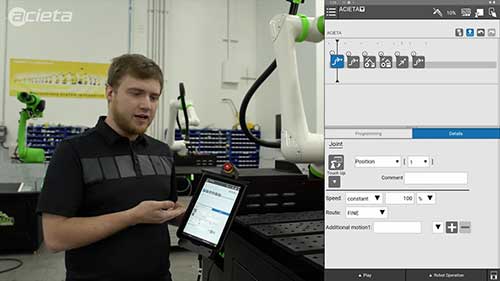
规划焊接机器人摆动轨迹
了解在FastARCCW与FANUCCRX-10iA焊接机器人上规划摆动轨迹的过程。
ABB机器人焊接系统设计
WeldguideIV是一款强大的Thru-Arc跟踪传感器,基于专利技术,专为ABB机器人焊接系统设计。WeldguideIV旨在跟踪由铸件或其他预处理问题导致的焊接接头变化困难。
库卡点焊机器人演示
我们将带大家参观位于德国奥格斯堡总部的库卡点焊技术中心,了解点焊机器人的使用。
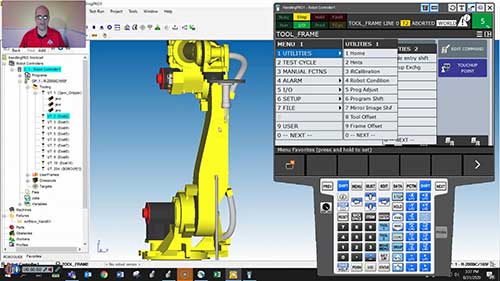
三点法设置工具坐标系
本片简要介绍如何使用三点法来设置发那科工业机器人的工具坐标系。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问