导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
235 播放
收藏
片段保存及分享
播放有问题?
请戳这里
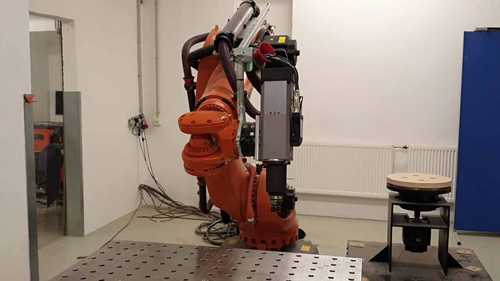
FANUC机器人维修中心
时长:3 分钟
类别:工业机器人技术
简介:FANUCEuropeanRepairCenter是FANUC公司在欧洲地区设立的维修中心。让我们去到现场看看常规机器人维修需要经过哪些步骤。
标签:
教学
工业机器人
工业机器人维护
相关视频:
工业机器人装箱和码垛
通用机器人UR5从一个进料传送带上拾取12个瓶子并将它们装入一个纸箱中。操作员将纸箱放在一个夹具中,机器人装载瓶子。
人工智能速成课程 1什么是人工智能
人工智能无处不在,它已经对我们的生活产生了巨大的影响。它可以与我们进行对话,为我们在应用平台上依我们的喜好推荐音乐、产品或者视频,并在游戏中与我们对战,还常常能打败我们,今天我们将解释人工智能目前的应用以及短板。
在KUKA机器人上运行编程程序
KUKA机器人用的是KUKA ROBOT language 简称KRL语言,就是高级帕斯卡语言。我将演示如何在KUKA工业机器人上运行KRL编程。
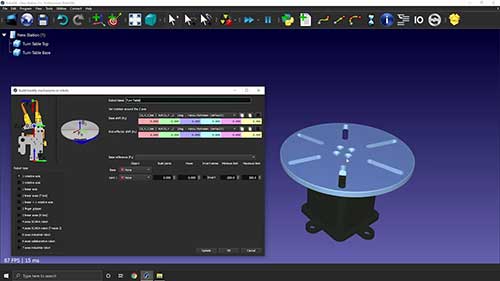
工业机器人转台建模
转台通常用于机器人加工应用,在这个视频中,您将学习如何建模单轴转台。
协作机器人焊接作业
AdvantaSoutheast引进了协作机器人进行焊接作业,这种协作机器人编程简单,上手快速,极大程度上提高了焊接效率。
Acieta协作机器人的设置
Acieta的杰克·康宁演示了如何设置FastLOADCX1000三指自适应机器人夹持器。
KUKA机器人安装过程
Loop技术公司正在为研发目的建造一个复合材料制造演示单元。它配备了两台KUKATitan机器人,安装在12米长的轨道上。
码垛和包装工业机器人
柯马为众多行业提供工业自动化系统,在今天的视频中,我们将看到码垛和包装的自动化过程。
观看记录: