导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1624 播放
收藏
片段保存及分享
播放有问题?
请戳这里
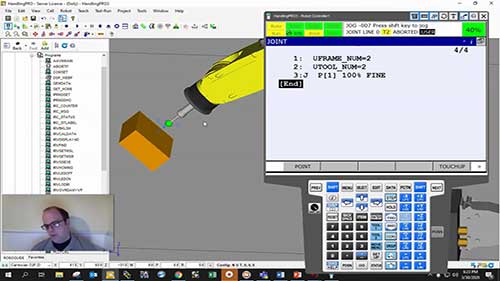
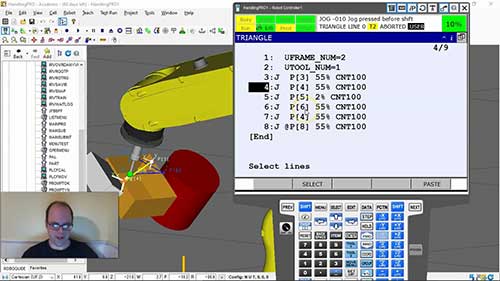
在KUKA机器人上运行编程程序
时长:6 分钟
类别:工业机器人技术
简介:KUKA机器人用的是KUKA ROBOT language 简称KRL语言,就是高级帕斯卡语言。我将演示如何在KUKA工业机器人上运行KRL编程。
标签:
教学
工业机器人技术
工业机器人编程
相关视频:
FANUC机器人工作原理
你能听懂关于机器人的一些专业术语吗?本片以FANUC机器人为例,来解释机器人的工作原理,重点放在机器人术语的解析上。
工业机器人编程——机器人系统
了解工业机器人编程的基础知识,学习工业机器人的主要编程语言以及不同的编程方法。
创建FANUC机器人工作指令
发那科fanuc机器人怎么创建动作指令?我们将以关节运动和笛卡尔运动来讲解。
FANUC机器人编程2
简要介绍Fanuc机器人编程中各种编辑指令选项的含义。
用三维测量装置校准工业机器人
通常,人们采用激光跟踪器来校准工业机器人,但激光跟踪器很贵,因为我们发明了一种低成本的三维测量装置,来校准工业机器人,具体原理收看本节目了解。
如何设定世界坐标系
在RobotStudio中创建虚拟工作站(带吊钩的焊接应用)需要大量的时间和精力。在这个视频中,您将了解工业机器人的世界坐标系是什么,以及如何使用它来移动您的机器人。
工业机器人编程软件——PowerMILL Robot
英国Delcam公司的罗宾·史密斯介绍了PowerMILL机器人编程软件,并演示了如何使用该软件,编写机器人雕刻石料的程序。
机器人焊接铝制零件
该工厂专门设计和制造汽车市场的铝结构零部件,自动化产线上的机器人正在进行铝制零件的焊接工作。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问