导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
198 播放
收藏
片段保存及分享
播放有问题?
请戳这里
全自动机器人装箱码垛系统
时长:3 分钟
类别:工业机器人技术
简介:这个机器人码垛系统可用于纸箱和包裹的堆垛。该机器人系统结合了ABB的技术和Jorgensen的专业知识,能够提供定制化解决方案。
标签:
教学
工业机器人
工业机器人应用
相关视频:
机器人是如何工作的
这个视频中,让我们了解机器人动作背后的机制以及机器人是如何制作的。
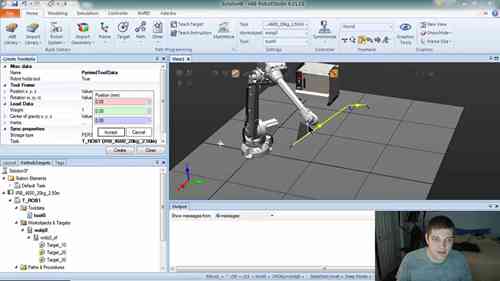
工业机器人编程3
工具座标系是机器人运动的基准。那么如何为ABB机器人设定工具坐标系呢?下面让我们看教程了解。
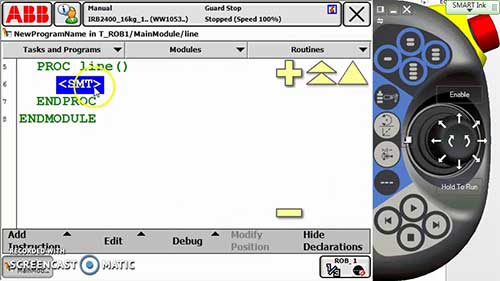
ABB机器人编程:运动代码
这是一个关于如何插入和理解运动代码行的基本教程。该视频介绍了简单的运动代码行。
ABB涂装机器人的调试
我们在机器人安装现场进行了预调试工作。这样现场机器人的安装和调试将会更加高效,并且能够显著降低成本。
神经网络机器人1原型和设计
人工神经网络就是模拟人思维的第二种方式。在应用方面,人们可以在网络模型与算法研究的基础上,利用人工神经网络组成实际的应用系统,例如,完成某种信号处理或模式识别的功能、构造专家系统、制成机器人等等。本视频要讲述的就是将其应用到制作机器人的第一步,我们将查看一些现成组件的原型,并创建一个定制的电路板。
VUDU工业机器人编程系统
VUDU系统能令机器人编程新手也能在很短的时间内对工业机器人进行编程。用户可以轻松对各种高精度工业机器人进行编程。
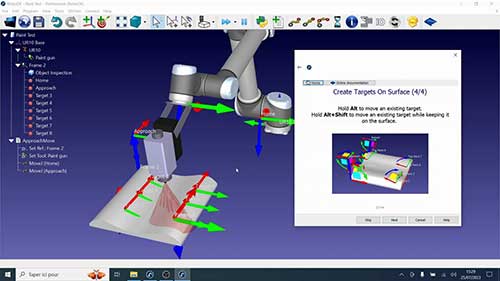
RoboDK仿真软件教程2
RoboDK支持各种类型的工业机器人和机器人品牌,用户可以选择并使用各种机器人模型。RoboDK还支持与CAD软件的集成,使用户能够直接从CAD软件中导入模型,并在RoboDK中生成机器人程序。
IRC5控制器:通用停止功能
ABB第五代机器人控制器IRC5始终受监控的通用停止功能,通常与光栅或地面扫描仪相连。
观看记录: