导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1702 播放
收藏
片段保存及分享
播放有问题?
请戳这里
软体机器人夹爪
时长:3 分钟
类别:工业机器人技术
简介:吉姆·马提斯现场演示使用软体机器人夹爪抓取各种物体,讲述了这种技术的多功能性和适应性。
标签:
教学
工业机器人技术
机器人夹爪
相关视频:
五款桌面级机械臂
随着机器人技术的兴起,机械臂已经不仅仅只限于工业场景的应用了,这段视频即将展示的五款精致小巧的桌面型机械臂将给人们的生活和工作带来便利。
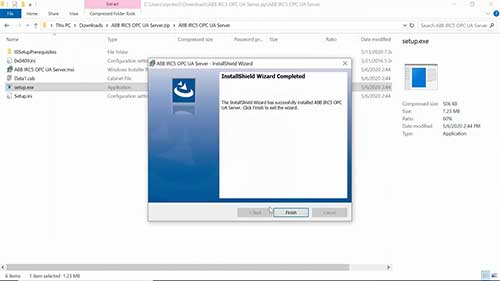
如何使用OPCUA服务器
学习如何使用IRC5OPCUA服务器。它将提供有关下载和安装服务器的说明。收看节目学习配置机器人控制器并使用IRC5OPCUA配置工具与机器人连接。
令人惊奇的机械臂
KUKA、FESTO、DENSO是全球知名的机器人公司,一起来看看他们研发的五款令人惊叹的工业机械臂。
机器人焊接技术
DesignPro是一家领先的公司,专注于开发和推广先进的机器人焊接技术。他们的焊接解决方案利用最新的自动化和机器人技术,为客户提供高效、精确和可靠的焊接解决方案。
自动化捆线装配系统
这种全自动化的机器人捆线装配系统由发那科机器人和定制的绕线机构组成,该系统可处理六种不同长度的线圈。
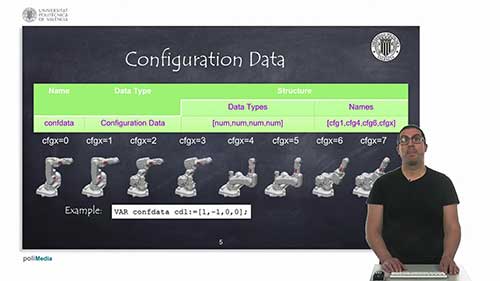
RAPID编程语言:复合数据类型
RAPID是用于编程ABB机器人的语言。本片解释了RAPID编程语言中最重要的复合数据类型。
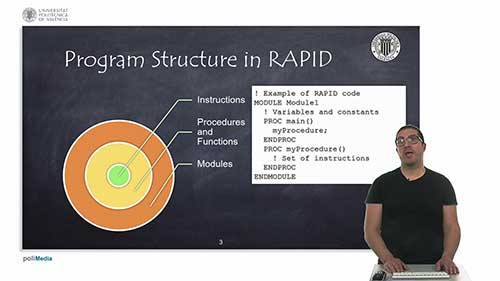
RAPID编程语言的基础知识
RAPID是一种用于编程ABB机器人的语言。本片介绍了一些关于RAPID编程语言的基础知识。
人工智能速成课程 概论
欢迎来到人工智能速成课程,在本系列节目中,主持人贾布尔·阿西娅将通过追溯人工智能的历史并研究其应用,向我们揭示隐藏在人工智能背后的秘密。
观看记录: