导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
251 播放
收藏
片段保存及分享
播放有问题?
请戳这里
川崎机器人码垛单元
时长:3 分钟
类别:工业机器人技术
简介:EtEPallet码垛单元是配备KawasakiRD080托盘堆垛机器人的托盘堆垛单元。
标签:
教学
工业机器人
工业机器人应用
相关视频:
串联机器人与并联机器人
2016年,Mecademic推出世界上最小的工业机器人。你可以把它放在手掌上的meca500机器人。这个六轴机械臂的重量只有5公斤,通过并行体系结构,机械臂动作可以达到极快的速度。
自动化生产线解决方案
这是一条自动化交钥匙工程项目,由9个连接单元组成,包括27台机器和9个用于钢铁重型卡车车轮的发那科机器人。
最先进的五种军用机器人
军事机器人是指为了军事目的而研制的自动机器人,在未来战争中,自动机器人士兵以后成为对敌作战的军事行动的绝对主力。本视频中,我们将讨论5中最先进的军事机器人,其中一些要么已经在军队中服役,要么不久后会引入。看看它们有多先进吧。
库卡焊接机器人编程软件
KUKA.MultiLayer可以安装在控制系统KRC4上,以便实现KUKA.ArcTechAdvanced的功能扩展。这样,便可以轻松快捷地进行多层焊缝编程并将其交由机器人进行处理。
KUKA机器人装配机器人机身
让我们一起进入KUKA的生产大厅,看看KUKA机器人是如何在两台#HELLERH加工中心的帮助下生产同类机器人的机身的。
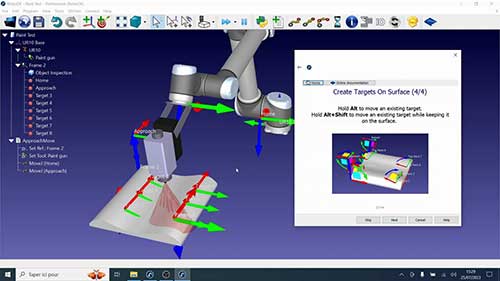
RoboDK仿真软件教程2
RoboDK支持各种类型的工业机器人和机器人品牌,用户可以选择并使用各种机器人模型。RoboDK还支持与CAD软件的集成,使用户能够直接从CAD软件中导入模型,并在RoboDK中生成机器人程序。
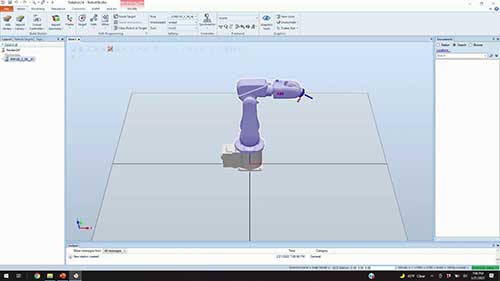
如何定义工件坐标系
RobotStudio是全球使用最广泛的机器人离线编程和仿真工具。我们解释了如何在ABBRobotStudio软件中定义工件坐标系。
为什么要校准工业机器人
工业机器人校准是一个集建模、测量、机器人实际参数辨识、误差补偿实现与一体的过程。下面我们将总结一下对工业机器人进行校准的必要性。
观看记录: