导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
192 播放
收藏
片段保存及分享
播放有问题?
请戳这里
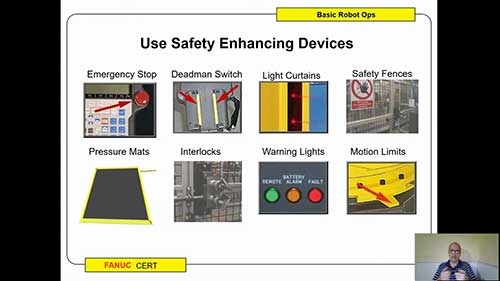
KUKA机器人电弧焊技术中心
时长:3 分钟
类别:工业机器人技术
简介:介绍了KUKA公司在全球范围内开设的TechCenter,并重点介绍了位于德国奥格斯堡总部的电弧焊技术中心。该中心通过机器人自动化技术缩短生产启动时间,并为客户提供测试和优化其应用的平台。
标签:
教学
工业机器人
工业机器人应用
相关视频:
基于视觉系统的工业机器人
VisualRobotics的VIM-201视觉系统具有优秀的3D视觉引导能力。该视频介绍了该系统的应用实例,包括在不同高度操作机器人进行拾取和放置、按大小进行分类等。
FANUC机器人的日常维护
Acieta的服务工程师讲解了如何对FANUC机器人进行日常快速检查。
ABB机器人维护
ABB机器人的全球服务支持和预防性维护可以确保客户现场的生产力和资产价值。
FANUC机器人工作原理
你能听懂关于机器人的一些专业术语吗?本片以FANUC机器人为例,来解释机器人的工作原理,重点放在机器人术语的解析上。
FANUC机器人电池更换
当发那科工业机器人的APC电池报警激活时,应该如何更换电池呢?
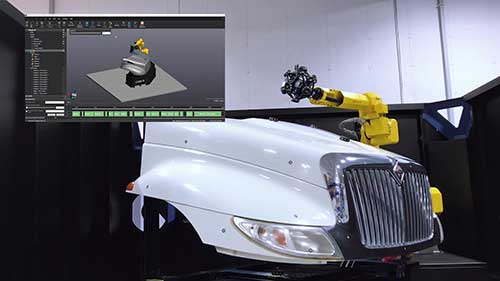
工业机器人编程软件——VXscan-R
VXscan-R是一款全新的工业机器人编程软件,它使3D扫描和编程变得很容易,没有机器人路径编程经验的人也能很快掌握。
多线机器人码垛系统
这条多线机器人码垛系统包括四条生产线,由三个发那科码垛机器人在两个独立的机器人单元中进行码垛。
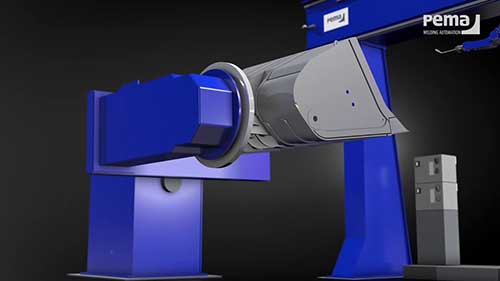
PEMA焊接机器人工作站
PEMA机器人焊接解决方案旨在满足重型设备行业的最高需求。PEMARWS自适应焊接机器人工作站提高了效率、生产灵活性和焊接质量。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问