导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
183 播放
收藏
片段保存及分享
播放有问题?
请戳这里
FANUC机器人定预防性维护1
时长:10 分钟
类别:工业机器人技术
简介:学习如何对FANUCR-2000iC165F地面安装机器人进行定期维护。Acieta的机器人系统工程师ChrisBosquez将详细介绍添加润滑脂和更换电池的步骤。
标签:
教学
工业机器人
工业机器人维护
相关视频:
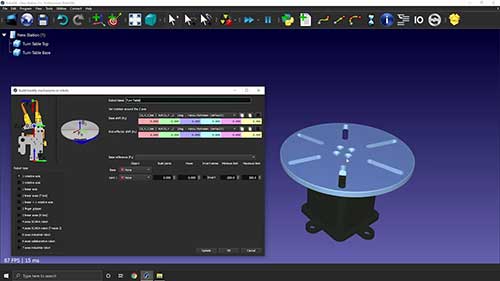
工业机器人转台建模
转台通常用于机器人加工应用,在这个视频中,您将学习如何建模单轴转台。
更换UR5机器人关节
迈克尔·戴维斯逐步演示了如何更换通用机器人UR5的腕部关节,他还提供了一些建议和技巧,以帮助我们更好地完成更换机器人关节。
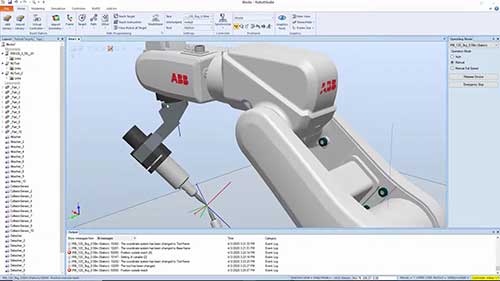
ABB工具数据
工具数据对于机器人的运动规划、路径生成和任务执行非常重要,它们需要被准确地输入到机器人控制系统中,以确保机器人能够准确地执行任务并且符合安全标准。
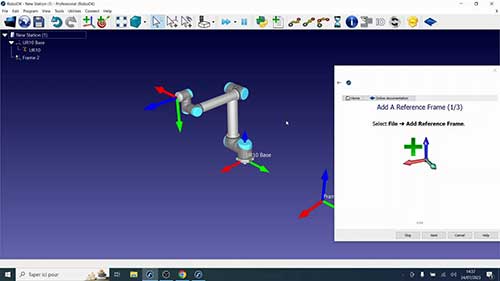
RoboDK仿真软件教程1
RoboDK是一种用于机器人程序生成和仿真的软件工具。它允许用户在虚拟环境中创建、模拟和验证机器人程序,然后将其转移到实际的机器人控制器中执行。
发那科机器人的世界坐标系
世界坐标系是被固定在空间上的标准直角坐标系,其被固定在由机器人事先确定的位置。Fanuc机器人的世界坐标系原点位置的大致标准是什么呢?收看节目了解如何给fanuc机器人设立世界坐标系。
人工智能速成课程 1什么是人工智能
人工智能无处不在,它已经对我们的生活产生了巨大的影响。它可以与我们进行对话,为我们在应用平台上依我们的喜好推荐音乐、产品或者视频,并在游戏中与我们对战,还常常能打败我们,今天我们将解释人工智能目前的应用以及短板。
机器人操作解析
在这个视频中,我们将在模拟环境中编程,让机械臂来拾取一个对象。在这个过程中,我们会同时学习正运动学和逆运动学。使用微积分优化机械手臂轨迹,并观察它的角度如何随时间变化,学习用三角法测量它们。我们会用Python写代码,这是学习机器人操作的一个好例子。
设定机器人焊接程序
了解在FastARCCW与FANUCCRX-10iA机器人上创建焊接程序的过程。无论你是初学者还是经验丰富的焊接工,这个视频都将帮助你高效地设置机器人焊接程序。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问