导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1862 播放
收藏
片段保存及分享
播放有问题?
请戳这里
人工智能速成课程 13创建游戏通关的AI
时长:14 分钟
类别:工业机器人技术
简介:今天,我们将创建一个叫“垃圾爆破者”的游戏,然后在创建一个人工智能来通关。我们将使用像进化神经网络这样的机器学习技术以及一个精心设计的适应度函数来创建一个不可阻挡的人工智能。
标签:
教学
工业机器人技术
人工智能
相关视频:
机器人操作解析
在这个视频中,我们将在模拟环境中编程,让机械臂来拾取一个对象。在这个过程中,我们会同时学习正运动学和逆运动学。使用微积分优化机械手臂轨迹,并观察它的角度如何随时间变化,学习用三角法测量它们。我们会用Python写代码,这是学习机器人操作的一个好例子。
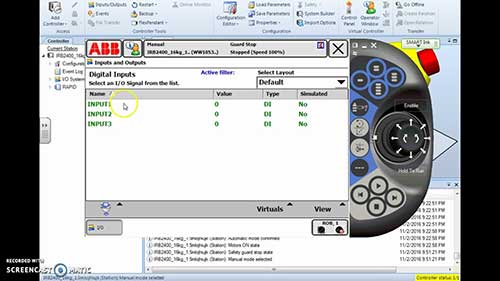
如何在示教器上模拟输入
这是一个关于如何在IRC5ABB示教器上模拟输入并激活输出的教学视频。
机器人焊接系统编程
学习启动和编程FastARC机器人焊接系统与FANUCArcMate机器人的简单步骤。了解如何设置控制器、命名程序、设置安全功能。
箱料机器人码垛系统
BW集成系统为IQF冷冻土豆产品公司开发了箱料码垛机器人系统。机器臂末端的工具可以根据工序任务来切换。
机器人自动化
如何在你的商店中装备机器人自动化?了解无代码编程接口如何使你的商店员工学习、实现和掌握自动化。
机器人焊接铝制零件
该工厂专门设计和制造汽车市场的铝结构零部件,自动化产线上的机器人正在进行铝制零件的焊接工作。
建造机器人夹爪
机器人专家詹姆斯·布鲁顿想做一个受力控制的机器人手臂。首先,他需要制造一个机器人夹爪。一起来看看这个机器人夹爪是如何制作的。
制造智能工业机器人
通过创新,日本机器人公司正在研发智能工业机器人,为世界面临的各种挑战提供自动化解决方案。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问