导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
184 播放
收藏
片段保存及分享
播放有问题?
请戳这里
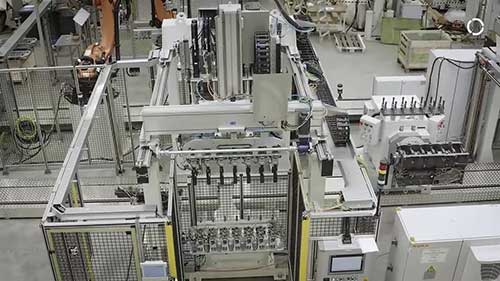
机器人焊接系统编程
时长:7 分钟
类别:工业机器人技术
简介:学习启动和编程FastARC机器人焊接系统与FANUCArcMate机器人的简单步骤。了解如何设置控制器、命名程序、设置安全功能。
标签:
教学
工业机器人
工业机器人编程
相关视频:
ABB机器人——运动控制
卓越的运动控制是ABB工业机器人的标志。在这段视频中,我们将看到ABB机器人绕着芬达易拉罐演示高速协作同步。
机器人自动化装配发动机
KUKA与斯堪尼亚一起实施了公司迄今为止最现代化的自动化工业机器人发动机装配线,从而为新一代商用车发动机奠定了基础。
人工智能速成课程 概论
欢迎来到人工智能速成课程,在本系列节目中,主持人贾布尔·阿西娅将通过追溯人工智能的历史并研究其应用,向我们揭示隐藏在人工智能背后的秘密。
人工智能和机器人技术
当你在听音乐的时候,看电视剧的时候,设备上的软件总能推送符合你喜好的推荐,它们是怎么做到的呢?没错就是AI技术。本段视频的重点就是介绍人工智能和机器人技术。
工业机器人控制器KRC5
工业机器人控制器KRC5可无缝集成到现有基础设施中,并通过在所有应用领域的更高效性能立即提供附加值。KUKAKRC5控制器提供了节省空间、提供高效性能并同时节省资源的可能性。
机器人焊接自动化
在汽车一级供应商领域,对速度的需求依然存在,并且表现良好。通过焊接机器人实现焊接自动化,大大提升了汽车组件的生产效率。
RAPID编码控制ABB机器人拾放1
贾斯汀.卡莫拉解释了如何编写ABB机器人来执行拾取和放置任务。贾斯汀使用了Rapid编程语言和手动记忆工作对象的组合来编写机器人代码。
机器人码垛系统
如果你正在挑选适合自己设施的自动化设备,我们可以给你建议。Columbia/Okura拥有专业化的单线和多线机器人码垛系统。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问