导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
207 播放
收藏
片段保存及分享
播放有问题?
请戳这里
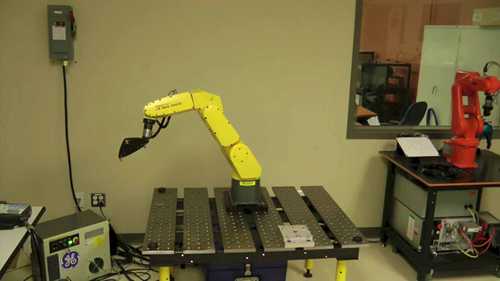
FANUC焊接机器人
时长:3 分钟
类别:工业机器人技术
简介:将使用FANUC工业机器人ARCMate100iD/10L进行焊接作业与使用FANUCCRX协作机器人进行焊接作业进行比较。
标签:
教学
工业机器人
工业机器人应用
相关视频:
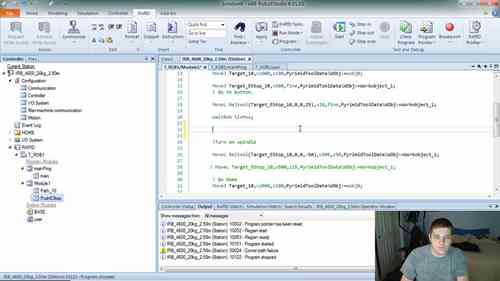
工业机器人编程7
为了工作任务的有序进行,机器人与机器人之间就要进行信号交互,以协调各自的工作顺序。这种机器人与机器人之间的信号交互在Robotstudio软件中是通过I/O信号配置来仿真的。
机器人搅拌摩擦焊接单元
视频展示了新的模块化cell4_FSW搅拌摩擦焊接单元,其中机器人程序的创建和虚拟调试通过模拟软件KUKA.Sim4.0来实现。
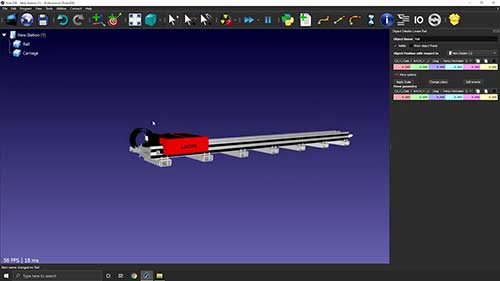
工业机器人轨道建模
工业机器人运动轨迹有各种形状和尺寸,甚至可以根据特定项目定制。在这个视频中,让我们学习如何在RoboDK中通过简单的几个步骤创建定制的轨道。
码垛和包装工业机器人
柯马为众多行业提供工业自动化系统,在今天的视频中,我们将看到码垛和包装的自动化过程。
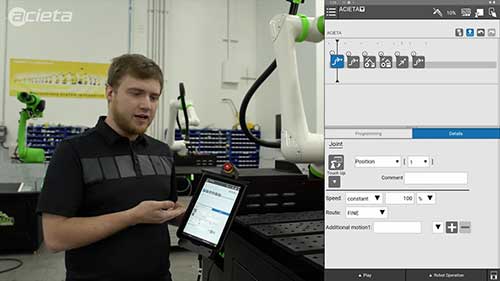
规划焊接机器人摆动轨迹
了解在FastARCCW与FANUCCRX-10iA焊接机器人上规划摆动轨迹的过程。
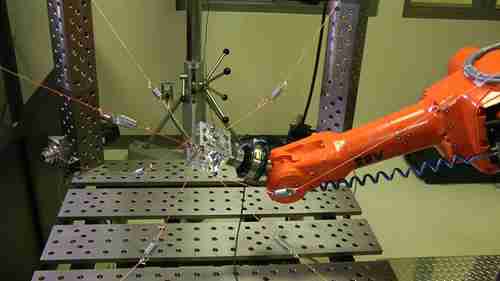
工业机器人的校准
CabOLS用于对工业机器人的末端执行器施加各种负载。这里将演示使用CabOLS电缆机器人和激光跟踪仪对工业机器人进行校准。
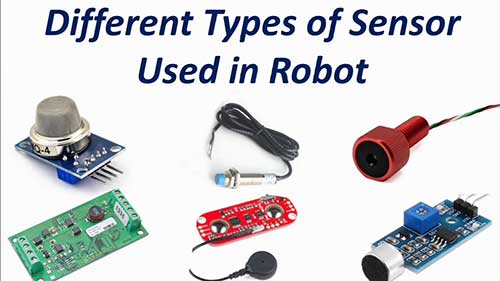
机器人传感器
机器人传感器在机器人控制中起着非常重要的作用,今天,我们将介绍不同种类的传感器,包括光传感器、声音传感器等。
工业机器人的校准和精度验证
发那科LR Mate 200iC是一款多功能6轴小型机器人,常用于搬运上下料。为了保持机器人的绝对精度,必须进行校准,这里介绍了校准发那科LR Mate 200iC工业机器人的两种方法。
观看记录: