导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
197 播放
收藏
片段保存及分享
播放有问题?
请戳这里
机器人搅拌摩擦焊接单元
时长:5 分钟
类别:工业机器人技术
简介:视频展示了新的模块化cell4_FSW搅拌摩擦焊接单元,其中机器人程序的创建和虚拟调试通过模拟软件KUKA.Sim4.0来实现。
标签:
教学
工业机器人
工业机器人应用
相关视频:
如何校准IRC5机器人控制器
我们将讨论六轴机器人以及如何校准IRC5控制器,当你没有校准摆锤工具时如何在IRC5上进行精细校准。
人工智能速成课程 3神经网络和深度学习
今天,我们将把我们上周创建的人工神经元组合成一个人工神经网络。对于像图像识别这样复杂的任务,人工神经网络比其他方法更好,其成功的关键在于其隐藏层。我们将讨论这些神经网络的运作原理,以及使用隐藏层是如何让我们得以进行深度学习的。
箱料机器人码垛系统
BW集成系统为IQF冷冻土豆产品公司开发了箱料码垛机器人系统。机器臂末端的工具可以根据工序任务来切换。
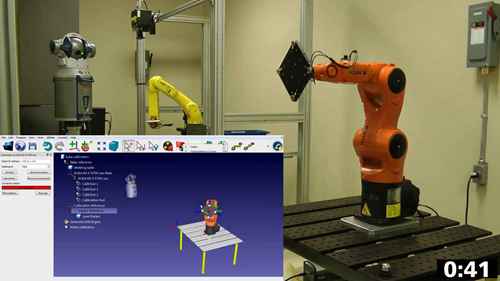
工业机器人校准
机器人校准是一个鉴定工业机器人运动学结构中的真实几何参数的过程。本节目演示了RoboDK分别通过Faro机器人跟踪仪与Creaform的C-Track双目相机测量仪实现机器人校准的过程。
安川机器人焊接解决方案
安川交钥匙机器人焊接解决方案,拥有独特的外围设备组合,如定位器、封闭单元、龙门或轨道。安川在机器人焊接系统工程方面拥有40多年的专业知识,并提供预先配置的解决方案或根据客户规格配置的系统。
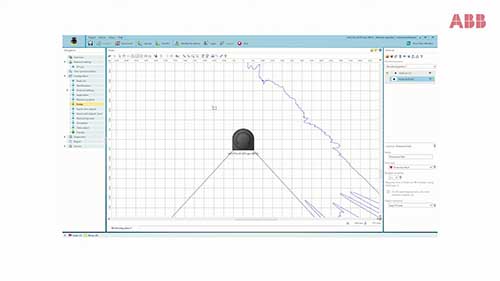
设置并配置SICK安全扫描仪
SWIFTI机器人集成了安全激光扫描仪和ABB的SafeMove协作安全功能,可确保移动的机器人不会与人发生接触,有效避免了人员受伤。本片将讲解如何设置和配置SICK安全扫描仪。
机器人是如何工作的
这个视频中,让我们了解机器人动作背后的机制以及机器人是如何制作的。
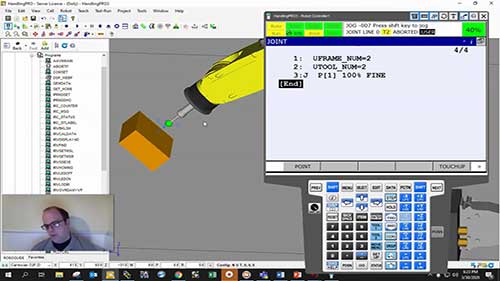
创建FANUC机器人工作指令
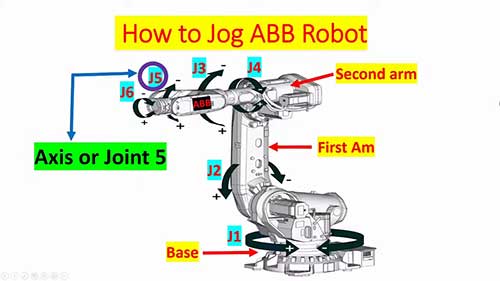
发那科fanuc机器人怎么创建动作指令?我们将以关节运动和笛卡尔运动来讲解。
观看记录: