导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1698 播放
收藏
片段保存及分享
播放有问题?
请戳这里
工业机器人的校准
时长:3 分钟
类别:工业机器人技术
简介:CabOLS用于对工业机器人的末端执行器施加各种负载。这里将演示使用CabOLS电缆机器人和激光跟踪仪对工业机器人进行校准。
标签:
教学
工业机器人技术
工业机器人校准
相关视频:
基于视觉系统的工业机器人
VisualRobotics的VIM-201视觉系统具有优秀的3D视觉引导能力。该视频介绍了该系统的应用实例,包括在不同高度操作机器人进行拾取和放置、按大小进行分类等。
焊接机器人的工作原理
焊接机器人是一种自动焊接设备。焊接工作中如何掌握焊接机器人的工作原理,有助于稳定焊接质量,提高焊接效率。
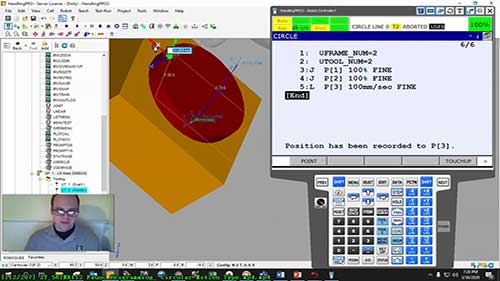
FANUC机器人编程1
简要介绍如何编程控制发那科机器人进行圆周运动。
KUKA机器人装配机器人机身
让我们一起进入KUKA的生产大厅,看看KUKA机器人是如何在两台#HELLERH加工中心的帮助下生产同类机器人的机身的。
ABB并联机器人IRB365
ABB正在扩展其FlexPickerDelta机器人产品组合,推出IRB365并联机器人。IRB365具有五个轴和1.5公斤的有效载荷,是同类产品中最灵活和速度最快的机器人,可重新定位包装轻型产品,如饼干、巧克力、辣椒、糖果、小瓶子和包裹。
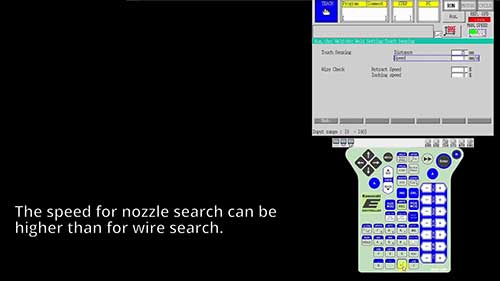
川崎机器人触摸感应功能
触摸感应涉及通过确定焊接工件的位移来找到位移矢量,方法是通过测量点的位置并将其与软件中存储的值进行比较。机器人可按照给定的模式在几个点上触摸要测量的物体。
机器人传感器解决方案
西克(SICK)公司的工业传感器解决方案适用于工业机器人的各个领域,为工业机器人应用带来革新。
全自动机器人码垛系统
Jorgensen工程公司开发了一种用于纸箱的机器人码垛系统。该机器人系统将发那科的技术和Jorgensen的专业知识完美结合。
观看记录: