导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
251 播放
收藏
片段保存及分享
播放有问题?
请戳这里
FANUC机器人编程5
时长:8 分钟
类别:工业机器人技术
简介:在FANUC编程中,数据寄存器是用于存储和处理数据的特殊寄存器。这些寄存器用于存储数值、地址、标志位等信息,以便在程序执行过程中进行读取、写入和处理。
标签:
教学
工业机器人
工业机器人编程
相关视频:
工业机器人的应用扩展
了解关于工业机器人的一些扩展应用,包括MXC5工具更换器、QS7碰撞传感器和机器人的气动夹具以及智能抓夹等。这些产品可以用于Nachi机器人。
多个机器人工作站的连接
由于机器人工作站平台的模块化架构,多个机器人工作站可以轻松灵活地相互连接。
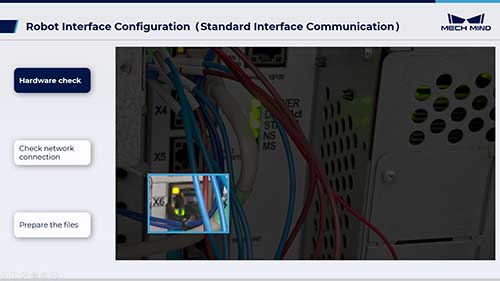
ABB机器人标准接口通信配置
本教程讲解了将程序文件加载到各种机器人中并使用不同的通信模式与机器人建立通信所需的操作步骤。这个视频演示了如何将程序文件加载到ABB机器人中,以建立机器人与Mech-Mind视觉系统之间的连接。
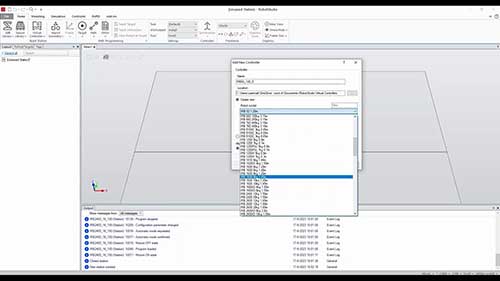
如何创建虚拟工作站
ABBIRC5是由瑞士-瑞典跨国公司ABB集团开发的机器人控制器。IRC5代表"工业机器人控制器5"。这是第五代机器人控制器,旨在控制和管理ABB的工业机器人系统。本教程将演示如何使用IRC5创建虚拟工作站。
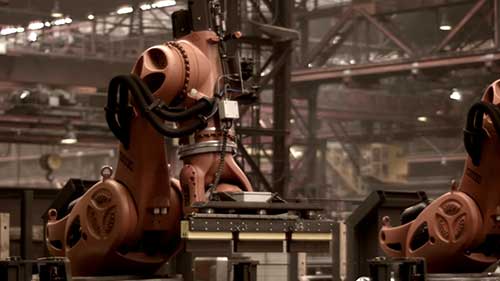
KUKA的重型工业机器人
MannstaedtGmbH在德国北莱茵-威斯特法伦州总部使用了六台KUKA的重型机器人,这些机器人每次最多可搬运2.5吨重量的钢制特殊横梁。
工业机器人的维修和翻新
工业机器人的定期维护、维修可以恢复机器人的可靠性,延长设备的使用寿命。
大疆无人机生产线
来到大疆无人机的总部,看看他们高度自动化的集中装配生产线,如何生产和测试无人机。
为机器人设置安全I/O信号
学习如何为带有SafeI/O选项3063-2和-4的SWIFT机器人设置安全I/O信号。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问