导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
184 播放
收藏
片段保存及分享
播放有问题?
请戳这里
多个机器人工作站的连接
时长:3 分钟
类别:工业机器人技术
简介:由于机器人工作站平台的模块化架构,多个机器人工作站可以轻松灵活地相互连接。
标签:
教学
工业机器人
工业机器人编程
相关视频:
人工智能速成课程 9强化学习
当我们想要训练人工智能,使其拥有某些我们自己都不完全了解的技能时,强化学习尤其有用。与我们目前讨论过的一些技术不同,强化学习一般只关注人工智能完成任务后如何执行任务。当一个人工智能完成了这项任务,相处何时以及如何奖励一个人工智能的方法,称为学分分配,这也是强化学习中最困难的部分之一。
ABB机器人——运动控制
卓越的运动控制是ABB工业机器人的标志。在这段视频中,我们将看到ABB机器人绕着芬达易拉罐演示高速协作同步。
低成本工业机器人的结构
本视频研究了四轴机器人运动学方面的知识,剖析了它们的结构。
如何集成一个协作机器人
只需七个步骤,就可以把这个协作机器人与Robotiq 2-Finger 85自适应机器人夹爪和通用机器人集成在一起。
工业机器人的校准和精度验证
发那科LR Mate 200iC是一款多功能6轴小型机器人,常用于搬运上下料。为了保持机器人的绝对精度,必须进行校准,这里介绍了校准发那科LR Mate 200iC工业机器人的两种方法。
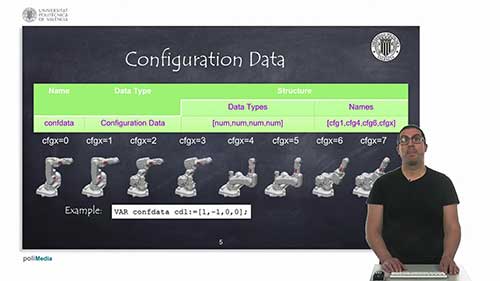
RAPID编程语言:复合数据类型
RAPID是用于编程ABB机器人的语言。本片解释了RAPID编程语言中最重要的复合数据类型。
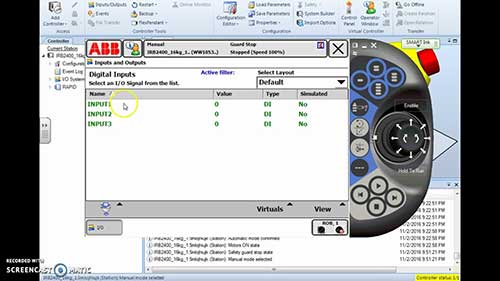
如何在示教器上模拟输入
这是一个关于如何在IRC5ABB示教器上模拟输入并激活输出的教学视频。
工业机器人的安全使用
这个简短的动画演示了工业机器人应用中使用的一些基本类型的安全屏障,目的是保护员工。
观看记录: