导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
251 播放
收藏
片段保存及分享
播放有问题?
请戳这里
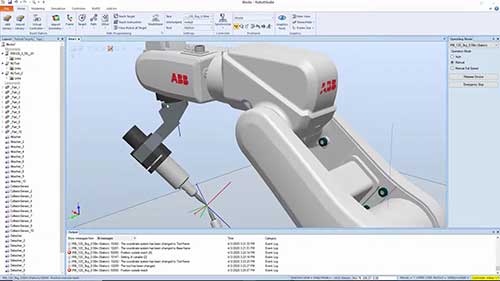
如何创建虚拟工作站
时长:3 分钟
类别:工业机器人技术
简介:ABBIRC5是由瑞士-瑞典跨国公司ABB集团开发的机器人控制器。IRC5代表"工业机器人控制器5"。这是第五代机器人控制器,旨在控制和管理ABB的工业机器人系统。本教程将演示如何使用IRC5创建虚拟工作站。
标签:
教学
工业机器人
工业机器人编程
相关视频:
人工智能速成课程 3神经网络训练
今天我们将讨论神经网络中的神经元是如何通过调整算法来学习的,这也被称为反向传播,以及我们如何通过找到权值的最佳组合来优化神经网络,使误差最小化。
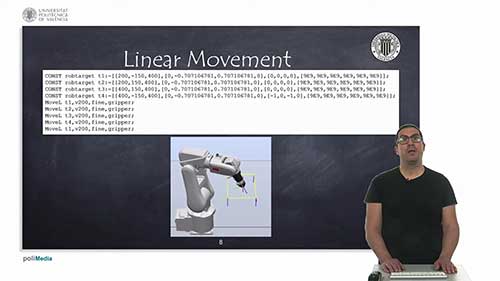
RAPID编程语言:运动指令
解释了如何在RAPID中使用运动指令,比如MoveAbsJ、MoveJ、MoveL和MoveC。RAPID是用于ABB机器人的编程语言。
工业机器人的安装过程
安装工业机器人,需要遵循制造商提供的安装手册和相关安全标准。安装过程通常包括确定位置、基础和支架安装、电气连接、机械安装、控制系统设置,测试和调试等步骤。
工业4.0——机器人制造业的复兴
在过去的10年里,机器人的使用量一直在上升,随着机器人自动化的好处变得越来越普遍,这一趋势只会继续下去。
FANUC机器人的零点复归
通常FANUC机器人出厂时都已经进行了零点复归,但有时会出现丢失零点数据的情况,这时就需要重新进行零点复归,这也是本节课程要讲的主题。
ABB工具数据
工具数据对于机器人的运动规划、路径生成和任务执行非常重要,它们需要被准确地输入到机器人控制系统中,以确保机器人能够准确地执行任务并且符合安全标准。
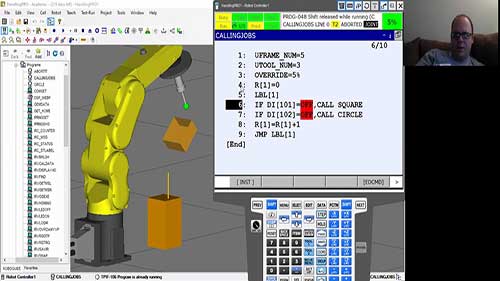
FANUC机器人编程5
在FANUC编程中,数据寄存器是用于存储和处理数据的特殊寄存器。这些寄存器用于存储数值、地址、标志位等信息,以便在程序执行过程中进行读取、写入和处理。
多个机器人工作站的连接
由于机器人工作站平台的模块化架构,多个机器人工作站可以轻松灵活地相互连接。
观看记录: