导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1663 播放
收藏
片段保存及分享
播放有问题?
请戳这里
人工智能速成课程 3神经网络训练
时长:13 分钟
类别:工业机器人技术
简介:今天我们将讨论神经网络中的神经元是如何通过调整算法来学习的,这也被称为反向传播,以及我们如何通过找到权值的最佳组合来优化神经网络,使误差最小化。
标签:
教学
工业机器人技术
人工智能
相关视频:
安川点焊机器人编程技术
安川点焊机器人是机器人焊接领域的佼佼者,我们将学习安川点焊机器人的基本编程技术,主要内容包括示教器概述、协作系统等。
配置GoFa机械臂侧接口
ABBGoFa协作机器人可安全持续地与人并肩工作,且易于安装和使用,本片是关于如何配置GoFa机器人机械臂端接口的简短教程视频。
RobotStudio离线编程教程4
学习如何在ABBRobotStudio环境中让机器人在虚拟环境中移动。
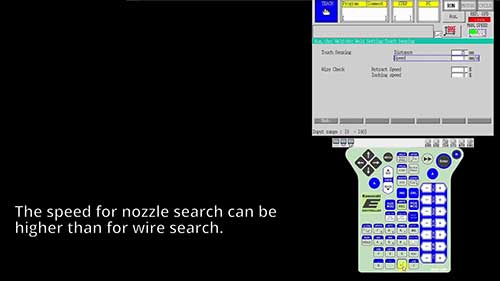
川崎机器人触摸感应功能
触摸感应涉及通过确定焊接工件的位移来找到位移矢量,方法是通过测量点的位置并将其与软件中存储的值进行比较。机器人可按照给定的模式在几个点上触摸要测量的物体。
码垛和包装工业机器人
柯马为众多行业提供工业自动化系统,在今天的视频中,我们将看到码垛和包装的自动化过程。
机器人概论
机器人通常被认为是未来的一种技术,但它们已经出现在了我们的工作场所、家里、甚至餐馆里,很快也会出现在道路上。我们有必要多了解一下它们,本段视频将讨论机器人的发展,以及一些常见的控制设计。
KUKA机器人离线编程软件
KUKA.Sim4.0适用于一般工业和汽车供应商的紧凑型可配置弧焊单元预组装并准备使用。通过KUKA.Sim,您可以在生产环境之外优化系统和机器人的运行。
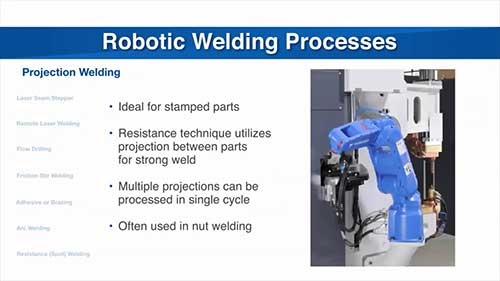
机器人焊接工艺介绍
作为机器人焊接领域的领导者,安川提供了各种热工艺解决方案,如:弧焊、点焊(电阻焊)、投影焊等工艺。
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问