导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1798 播放
收藏
片段保存及分享
播放有问题?
请戳这里
安川点焊机器人编程技术
时长:5 分钟
类别:工业机器人技术
简介:安川点焊机器人是机器人焊接领域的佼佼者,我们将学习安川点焊机器人的基本编程技术,主要内容包括示教器概述、协作系统等。
标签:
教学
工业机器人技术
焊接机器人
相关视频:
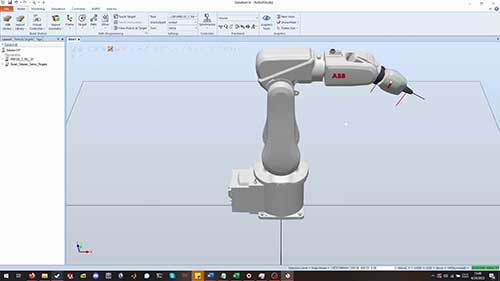
ABB机器人夹具建模
迈克尔解释了如何在ABBRobotStudio中给夹具(末端执行器)建模并模拟其进行拾取和放置任务。
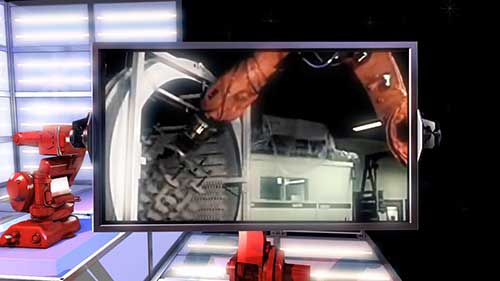
ABB机器人:铸造应用
现代铸造厂不断寻求提高效率、增加灵活性和改善工作场所安全的方法。这部影片展示了ABB机器人在铸造领域的应用。
SCARA工业机器人
这个电子学习模块介绍了SCARA机器人和Yaskawa的SCARA机器人产品生产线。
机器人自动化装配发动机
KUKA与斯堪尼亚一起实施了公司迄今为止最现代化的自动化工业机器人发动机装配线,从而为新一代商用车发动机奠定了基础。
设定机器人焊接程序
了解在FastARCCW与FANUCCRX-10iA机器人上创建焊接程序的过程。无论你是初学者还是经验丰富的焊接工,这个视频都将帮助你高效地设置机器人焊接程序。
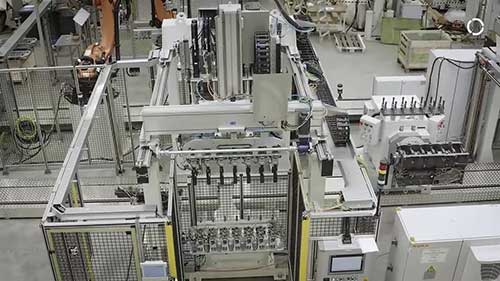
多线机器人码垛系统
这条多线机器人码垛系统包括四条生产线,由三个发那科码垛机器人在两个独立的机器人单元中进行码垛。
FANUC机器人编程教程1
Roboguide是一款FANUC自带的支持机器人系统布局设计和动作模拟仿真的软件,我们将在该软件上编写简单的拾取与放置示教程序,然后运行。
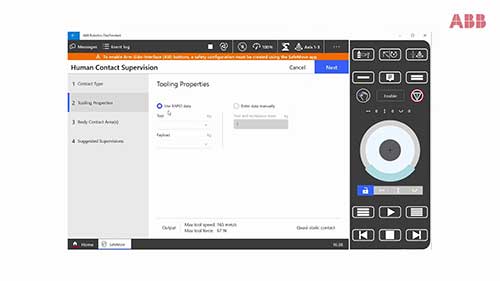
配置SafeMove安全系统3
在工业机器人和自动化系统中,配置SafeMove是指对其安全功能进行设置和调整。这一集中将讲解如何配置人体接触监控,这是指在机器人工作时监测和监控人与机器人之间的接触情况,以确保工作过程中人员的安全。
观看记录: