导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
315 播放
收藏
片段保存及分享
播放有问题?
请戳这里
KUKA的重型工业机器人
时长:2 分钟
类别:工业机器人技术
简介:MannstaedtGmbH在德国北莱茵-威斯特法伦州总部使用了六台KUKA的重型机器人,这些机器人每次最多可搬运2.5吨重量的钢制特殊横梁。
标签:
教学
工业机器人
工业机器人应用
相关视频:
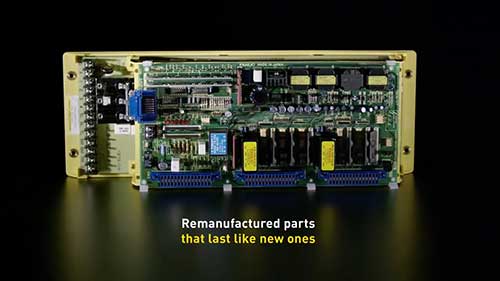
FANUC机器人维修中心
FANUCEuropeanRepairCenter是FANUC公司在欧洲地区设立的维修中心。让我们去到现场看看常规机器人维修需要经过哪些步骤。
Wizard简易编程软件
ABB机器人公司推出了Wizard简易编程软件,这款软件适用于IRB 1100工业机器人,用户可以在不需要专业编程技能的情况下,将机器人自动化引入生产线。
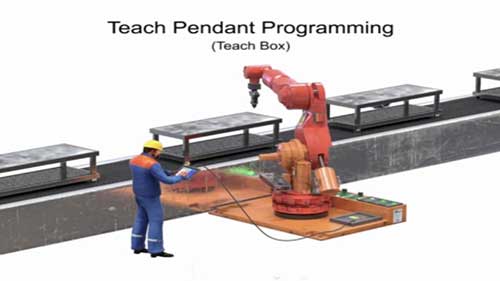
工业机器人手臂设计和编程
学习工业机器人手臂轴运动的基础知识,了解两种在线工业机器人编程教程。
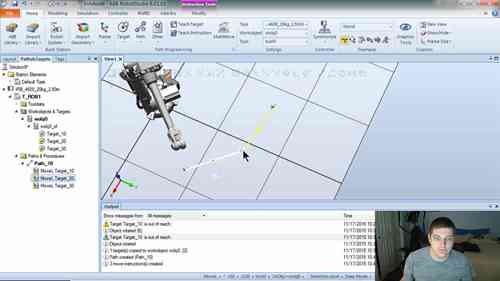
工业机器人编程2
RobotStudio是一款ABB机器人仿真软件,用户可以借助虚拟机器人技术进行离线编程,本集ABB机器人编程教程的主要内容是讲解机器人基本的运动控制指令。
ABB机器人IRC5示教器功能演示
本片是ABB最新版本机器人操作设备IRC5示教器的功能演示视频。
西雅特汽车生产线
在西雅特的机器人强化金属车间,2000个工业机器人与1700名员工同步工作,每68秒制造出一辆新汽车。
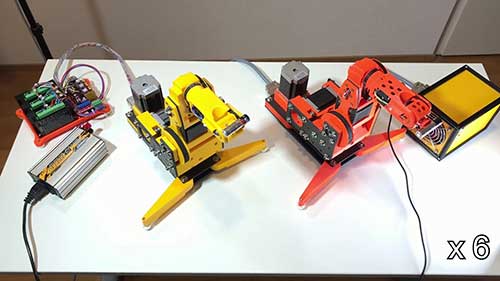
六自由度机械臂 06
这款六自由度机械臂的代码适用于Trinamic步进电机驱动器,一起来看看如何编写这个机械臂的Arduino代码。
ABB示教器触摸屏
ABB公司的吉姆介绍了在选择机器人示教器时要注意的事项。他将ABB新型示教器(带有专利摇杆和触摸屏)与更传统的基于完整键盘的示教器进行了比较。
观看记录: