导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1545 播放
收藏
片段保存及分享
播放有问题?
请戳这里
人工智能速成课程 19猫还是狗AI帮你搞定
时长:14 分钟
类别:工业机器人技术
简介:今天,在我们最后一个实验室里,贾布尔试图制造一个人工智能来彻底解决这个问题“狗或者猫。哪种宠物能让我们更快乐?”但在建造这个人工智能的过程中,贾布尔会意外地植入一些她一直试图避免的偏见。所以今天我们将讨论偏见是如何潜入我们的算法,以及我们能做些什么来解决这些问题。
标签:
教学
工业机器人技术
人工智能
相关视频:
人工智能速成课程 13创建游戏通关的AI
今天,我们将创建一个叫“垃圾爆破者”的游戏,然后在创建一个人工智能来通关。我们将使用像进化神经网络这样的机器学习技术以及一个精心设计的适应度函数来创建一个不可阻挡的人工智能。
机器人焊接铝制零件
该工厂专门设计和制造汽车市场的铝结构零部件,自动化产线上的机器人正在进行铝制零件的焊接工作。
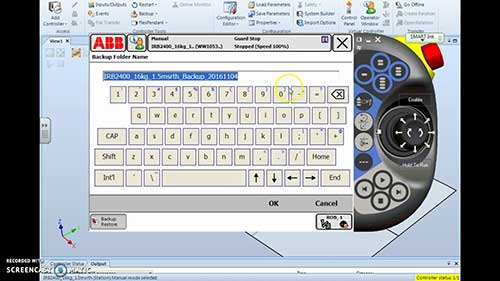
为IRC5控制器创建备份
这是一个关于如何用示教器为ABBIRC5控制器创建备份的简短视频。
发那科机器人的世界坐标系
世界坐标系是被固定在空间上的标准直角坐标系,其被固定在由机器人事先确定的位置。Fanuc机器人的世界坐标系原点位置的大致标准是什么呢?收看节目了解如何给fanuc机器人设立世界坐标系。
ABB涂装机器人的调试
我们在机器人安装现场进行了预调试工作。这样现场机器人的安装和调试将会更加高效,并且能够显著降低成本。
FANUC机器人电池更换
当发那科工业机器人的APC电池报警激活时,应该如何更换电池呢?
工业机器人的工作原理
在这期节目中,我们将学习机器人和机器人的工程原理。通过学习,我们会了解机器人是如何使用传感器来分析周围的环境,有时如何通过执行器来完成任务。
ABB机器人维护
ABB机器人的全球服务支持和预防性维护可以确保客户现场的生产力和资产价值。
观看记录:








 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问