导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1814 播放
收藏
片段保存及分享
播放有问题?
请戳这里
神经网络机器人2焊接和组装
时长:15 分钟
类别:工业机器人技术
简介:在神经网络机器人系列视频中的第二集里,西恩将创建一个基于Arduino的开源神经网络机器人。上一集里我们创造了一个定制的电路板。在这一集中我们将在PCB板上进行电子元件焊接和组装。
标签:
教学
工业机器人技术
神经网络
相关视频:
KUKA机器人电弧焊技术中心
介绍了KUKA公司在全球范围内开设的TechCenter,并重点介绍了位于德国奥格斯堡总部的电弧焊技术中心。该中心通过机器人自动化技术缩短生产启动时间,并为客户提供测试和优化其应用的平台。
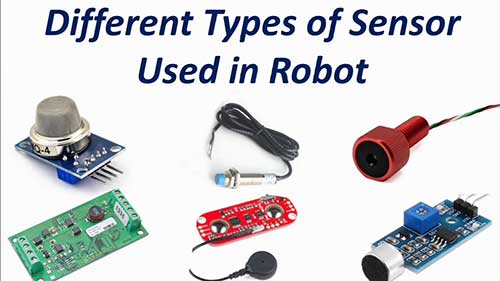
机器人传感器
机器人传感器在机器人控制中起着非常重要的作用,今天,我们将介绍不同种类的传感器,包括光传感器、声音传感器等。
库卡点焊机器人演示
我们将带大家参观位于德国奥格斯堡总部的库卡点焊技术中心,了解点焊机器人的使用。
人工智能速成课程 8让AI像播客那样讲话
让我们用自然语言处理来帮助机器人约翰像个真正的播客那样讲话。今天,我们将编写一个程序,给与一个单词提示,就能完成一句像是机器人约翰这种AI会说的句子。为此,我们将从格林兄弟科普视频网集中收集转录文件,做一些预处理,因为机器人约翰有相当大的词汇量,接着我们将建立一个递归神经网络(RNN),训练我们的模型,并测试它!
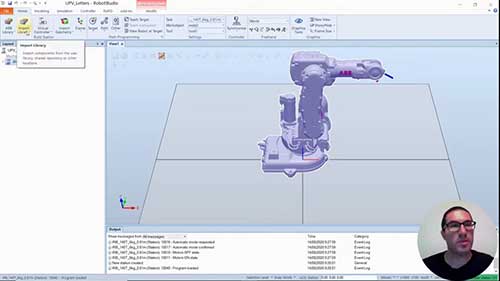
创建机器人路径轨迹
如何在RobotStudio中创建机械化(铣削)轨迹。本视频使用了ABB的IRB140机器人来生成路径轨迹。
用示教器操作SWIFTI机器人
使用Flexpendant示教器可以以各种方式安全而精确地移动SWIFTIcobot。观看视频,了解使用Flexpendant示教器操作机器人的全部功能。
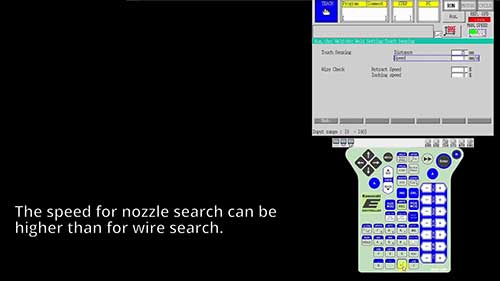
川崎机器人触摸感应功能
触摸感应涉及通过确定焊接工件的位移来找到位移矢量,方法是通过测量点的位置并将其与软件中存储的值进行比较。机器人可按照给定的模式在几个点上触摸要测量的物体。
焊接机器人与焊接自动化
由UniversalRobotsUR10e协作机器人驱动的DIYVectisCobot焊接工具可实现焊接自动化,快速换模和优化生产。
观看记录:






 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问