导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
265 播放
收藏
片段保存及分享
播放有问题?
请戳这里
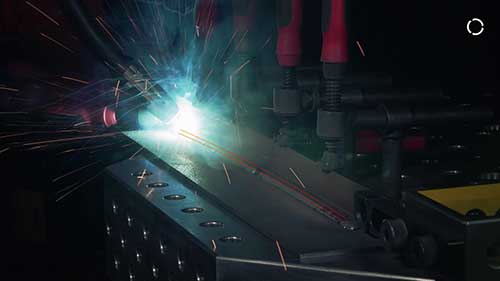
川崎机器人焊接单元
时长:2 分钟
类别:工业机器人技术
简介:焊接单元采用川崎BA006L机器人和E01控制器,基于具有双工作单元的H型框架。在第一个工作站可以加载要加工的元件,同时机器人在第二侧对细节进行焊接。
标签:
教学
工业机器人
工业机器人应用
相关视频:
软体机器人制造
有些软体机器人的抓取夹爪是带集成磁穹执行器的双向波纹管制成的,这段视频展示了这种双向波纹管的制造过程。
库卡焊接机器人编程软件
KUKA.MultiLayer可以安装在控制系统KRC4上,以便实现KUKA.ArcTechAdvanced的功能扩展。这样,便可以轻松快捷地进行多层焊缝编程并将其交由机器人进行处理。
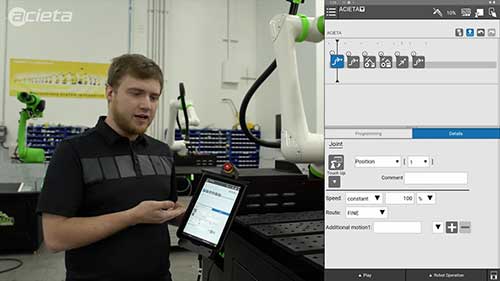
机器人焊接码垛系统
Cotterman是一家滚动金属梯子制造商,希望通过将梯子零部件的制造集中到一个工厂来减少运费成本。Acieta公司设计了一个多功能机器人系统,配备了三台FANUC机械臂,可以24/7无缝地完成梯子踏板的制造。
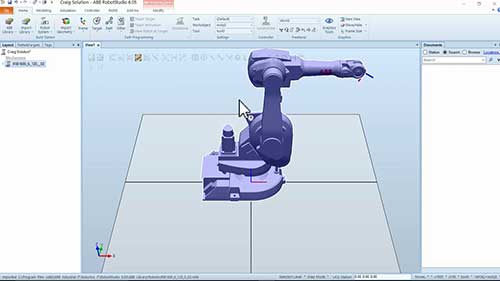
RobotStudio离线编程教程9
讲解如何导入在Solidworks中创建的几何图形并将其转换为工具,如何在新工具上创建“工具中心点”并将该工具附加到机器人上。使用RobotStudio在ABB机器人上添加柔性电缆和焊接工具。
为什么要校准工业机器人
工业机器人校准是一个集建模、测量、机器人实际参数辨识、误差补偿实现与一体的过程。下面我们将总结一下对工业机器人进行校准的必要性。
工业4.0——机器人制造业的复兴
在过去的10年里,机器人的使用量一直在上升,随着机器人自动化的好处变得越来越普遍,这一趋势只会继续下去。
规划焊接机器人摆动轨迹
了解在FastARCCW与FANUCCRX-10iA焊接机器人上规划摆动轨迹的过程。
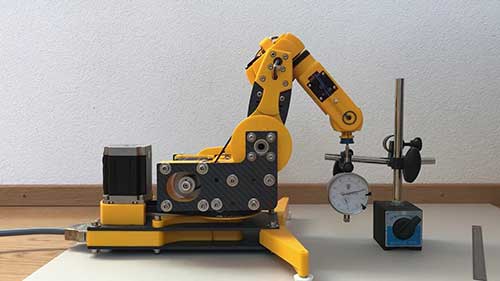
六自由度机械臂 04
在前面的视频中,我们已经完成了这个六自由度机械臂的第三、四、五、六轴的组装,今天我们将完成第一轴和第二轴的构建工作。
观看记录: