导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1670 播放
收藏
片段保存及分享
播放有问题?
请戳这里
在机械臂上应用运动控制系统 01
时长:6 分钟
类别:工业机器人技术
简介:RS开发了一种基于Industrial Shields开源PLC的运动控制系统,并将其应用于工作台机械臂。
标签:
教学
工业机器人技术
控制系统
相关视频:
五大工业机器人
随着机器人技术的不断发展,工业机器人已广泛应用于各行各业。在这里,我们将介绍ABB紧凑型机器人、KUKA小型六轴机器人、DAIHEN弧焊机器人等五款先进的工业机器人。
工业机器人的维护
工业机器人服务是指为工业机器人提供的各种支持和维护服务。包括安装和调试,维护和保养,培训,故障排除和修理等。
人工智能速成课程 3神经网络训练
今天我们将讨论神经网络中的神经元是如何通过调整算法来学习的,这也被称为反向传播,以及我们如何通过找到权值的最佳组合来优化神经网络,使误差最小化。
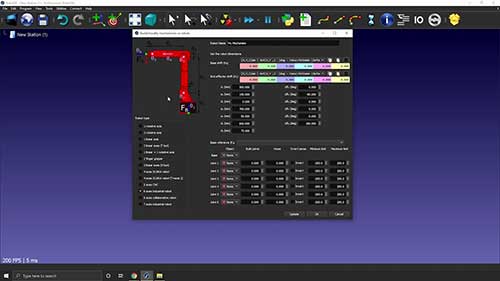
工业机器人建模1
学习如何使用RoboDK仿真软件从头开始对六轴工业机器人进行建模。
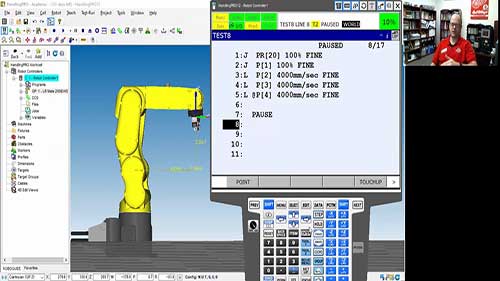
FANUC机器人编程:偏移量
简单介绍了发那科机器人编程中偏移量的工作原理。
人工智能速成课程 概论
欢迎来到人工智能速成课程,在本系列节目中,主持人贾布尔·阿西娅将通过追溯人工智能的历史并研究其应用,向我们揭示隐藏在人工智能背后的秘密。
如何设置工具中心点
学习如何为SWIFTI、CRB1100和CRB1300机器人系统设置工具坐标系的原点,即工具中心点。
FD系列机器人编程教程
OTC FD系列工业机器人增大了有效载荷,功能众多,适用于物料搬运,零件精加工,点胶,机器装载/卸载以及焊件搬运加定位。杰森·罗宾逊介绍了该系列工业机器人的操作和编程。
观看记录:




 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问