导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
223 播放
收藏
片段保存及分享
播放有问题?
请戳这里
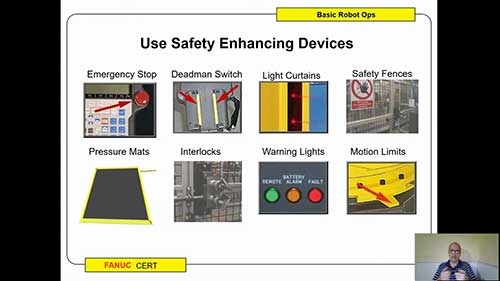
如何创建工具和用户坐标系
时长:19 分钟
类别:工业机器人技术
简介:简要介绍如何在发那科机器人系统的Roboguide软件中创建和使用工具/用户坐标系。
标签:
教学
工业机器人
工业机器人编程
相关视频:
模糊逻辑设计和模糊控制概论
您可能已经知道,计算机只能处理包含0和1的二进制格式的信息。这意味着如果你想和计算机交流,你需要学习代码。此外,您编写的程序稍后将被转换为硬件级代码,机器可以理解这些代码,因为它只包含0和1。虽然二进制系统对于机器来说是完美的,但是对于人类来说却很不方便。而使用模糊系统则不需要一个中间系统来转换这些变量。这就是我们要学习模糊逻辑的原因,因为它让我们与机器的沟通更方便。
机器人焊接码垛系统
Cotterman是一家滚动金属梯子制造商,希望通过将梯子零部件的制造集中到一个工厂来减少运费成本。Acieta公司设计了一个多功能机器人系统,配备了三台FANUC机械臂,可以24/7无缝地完成梯子踏板的制造。
饮料瓶自动化生产线
FANUC开发了一款自动化饮料瓶输送系统,利用6个M-710iC/50H机器人将饮料瓶从运货板上移除,并将其放到传送带上。
工业机器人的安装过程
安装工业机器人,需要遵循制造商提供的安装手册和相关安全标准。安装过程通常包括确定位置、基础和支架安装、电气连接、机械安装、控制系统设置,测试和调试等步骤。
协作机器人焊接作业
AdvantaSoutheast引进了协作机器人进行焊接作业,这种协作机器人编程简单,上手快速,极大程度上提高了焊接效率。
人工智能速成课程 7自然语言处理
今天,我们将讨论自然语言处理,或称NLP,向你们展示一些计算机可以用来更好地理解语言的策略,比如分布语义,然后我们将向你们介绍一种简称为RNN的神经网络——递归神经网络,来构建句子。
KUKA机器人离线编程软件
KUKA.Sim4.0适用于一般工业和汽车供应商的紧凑型可配置弧焊单元预组装并准备使用。通过KUKA.Sim,您可以在生产环境之外优化系统和机器人的运行。
FANUC机器人工作原理
你能听懂关于机器人的一些专业术语吗?本片以FANUC机器人为例,来解释机器人的工作原理,重点放在机器人术语的解析上。
观看记录:







 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问