导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
280 播放
收藏
片段保存及分享
播放有问题?
请戳这里
FANUC机器人工作原理
时长:32 分钟
类别:工业机器人技术
简介:你能听懂关于机器人的一些专业术语吗?本片以FANUC机器人为例,来解释机器人的工作原理,重点放在机器人术语的解析上。
标签:
教学
工业机器人
工业机器人操作
相关视频:
如何安装RobotWare软件
RobotWare是机器人系统的软件版本。获取有关如何在OmniCore系统上安装RobotWare的逐步指导。
Acieta协作机器人的维护
Acieta的服务经理托德解释了如何对FastLOADCX1000协作机器人进行预防性维护:更换电池。
装配自动化与检验
这台机器专为自动组装阀体和橡胶头设计,一起来看看自动装配和检测过程。
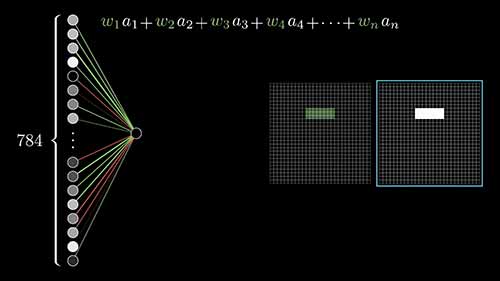
什么是人工神经网络
人工神经网络(ArtificialNeuralNetworks,简写为ANNs)是一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。本视频将用生动的例子向你讲解人工神经网络的概念。
移动程序运行指针PP
学习将程序运行指针PP移至例行程序,步进移动操作。还将教你程序应用、导航、手动操作机器人、连接I/O信号、冷启动机器人、读取和修改程序等知识。
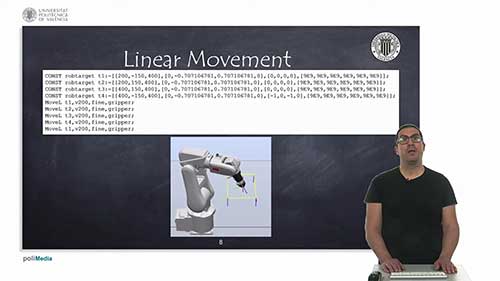
RAPID编程语言:运动指令
解释了如何在RAPID中使用运动指令,比如MoveAbsJ、MoveJ、MoveL和MoveC。RAPID是用于ABB机器人的编程语言。
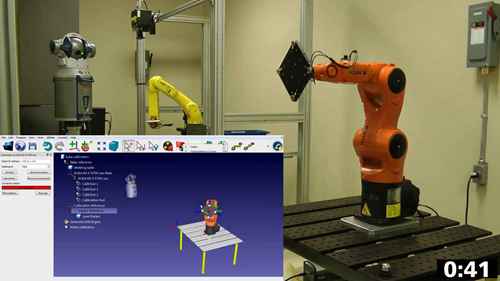
工业机器人校准
机器人校准是一个鉴定工业机器人运动学结构中的真实几何参数的过程。本节目演示了RoboDK分别通过Faro机器人跟踪仪与Creaform的C-Track双目相机测量仪实现机器人校准的过程。
FANUC机器人电池更换
当发那科工业机器人的APC电池报警激活时,应该如何更换电池呢?
观看记录:





 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问