导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1777 播放
收藏
片段保存及分享
播放有问题?
请戳这里
FANUC机器人编程教程1
时长:54 分钟
类别:工业机器人技术
简介:Roboguide是一款FANUC自带的支持机器人系统布局设计和动作模拟仿真的软件,我们将在该软件上编写简单的拾取与放置示教程序,然后运行。
标签:
教学
工业机器人技术
工业机器人编程
相关视频:
5步教你开发出专家系统
本视频展示了教你开发出专家系统的五个步骤,第一了解用户需求,第二找专家获取知识库的数据,第三构建知识库以及推理机,第四,设计输入和输出屏,第五创建出专家系统。
配置ABB安全可扩展I/O
ABB标准I/O板是ABB工业机器人最常使用的一种接口方式,其本质为一种可编程控制器(PLC);本片讲解了如何配置ABB安全可扩展I/O。
Acieta协作机器人编程
Acieta推出FastLoadCX1000可扩展协作机器人,查看FastLOADCX1000可扩展单元上提供的控制机器人进行拖放运动的编程教程。
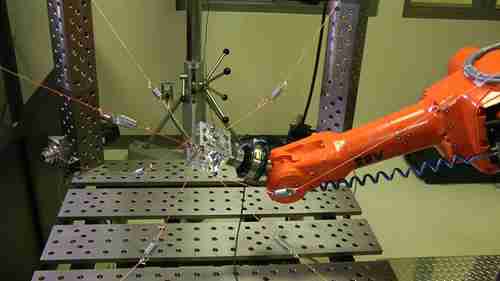
工业机器人的校准
CabOLS用于对工业机器人的末端执行器施加各种负载。这里将演示使用CabOLS电缆机器人和激光跟踪仪对工业机器人进行校准。
模糊逻辑介绍
这个视频介绍了模糊逻辑,包括模糊集合的基础,模糊规则,以及这些如何在决策中结合使用模糊逻辑。
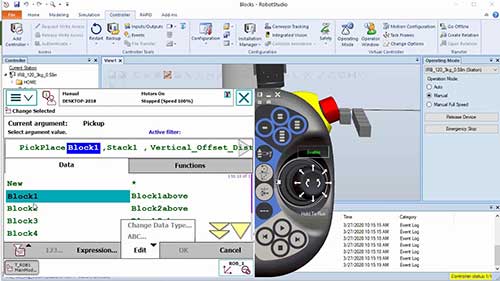
RobotStudio程序数据
程序数据在RobotStudio中被用于创建、调试和优化机器人应用程序,以确保机器人在实际工作中能够高效、安全地执行任务。
机器人自动化组装桁架
汤米·伍兹描述了BFSVillaRica安装新自动化桁架生产线的工作情况。机器人在工作单元里拼接预装板并组装桁架。
RobotStudio离线编程教程5
收看节目,了解如何在ABBRobotStudio中将一个物体转换为工件?
观看记录:




 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问