导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
1789 播放
收藏
片段保存及分享
播放有问题?
请戳这里
串联机器人与并联机器人
时长:2 分钟
类别:工业机器人技术
简介:2016年,Mecademic推出世界上最小的工业机器人。你可以把它放在手掌上的meca500机器人。这个六轴机械臂的重量只有5公斤,通过并行体系结构,机械臂动作可以达到极快的速度。
标签:
教学
工业机器人技术
机器人概论
相关视频:
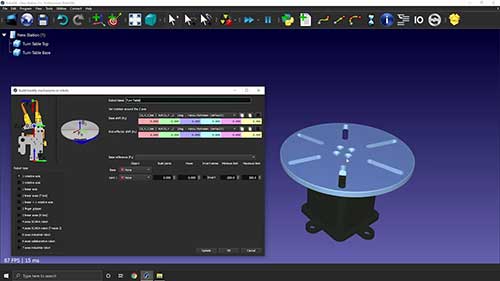
工业机器人转台建模
转台通常用于机器人加工应用,在这个视频中,您将学习如何建模单轴转台。
数据寄存器和位置寄存器的运用
数值寄存器用来存储某一整数值或小数值得变量,位置寄存器,是用来存储位置资料的变量。节目以发那科工业机器人为例,介绍了数据寄存器和位置寄存器的运用以及编程方式。
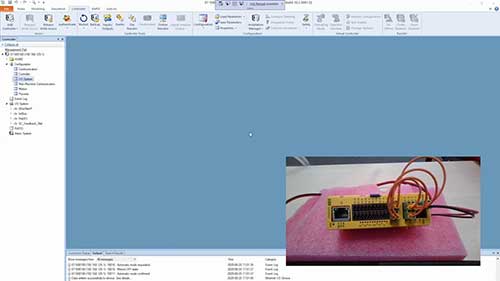
配置ABB安全可扩展I/O
ABB标准I/O板是ABB工业机器人最常使用的一种接口方式,其本质为一种可编程控制器(PLC);本片讲解了如何配置ABB安全可扩展I/O。
ABB并联机器人IRB365
ABB正在扩展其FlexPickerDelta机器人产品组合,推出IRB365并联机器人。IRB365具有五个轴和1.5公斤的有效载荷,是同类产品中最灵活和速度最快的机器人,可重新定位包装轻型产品,如饼干、巧克力、辣椒、糖果、小瓶子和包裹。
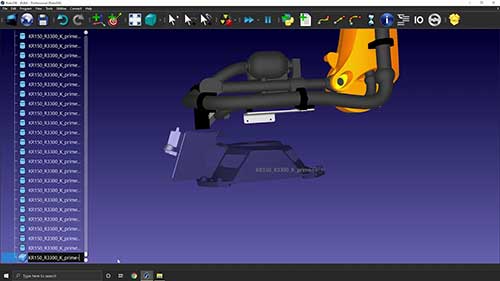
机器人3D建模
我们将以KUKAKR150R3300机器人和DobotCR3协作机器人为例,讲解如何在RoboDK软件中输入机器人模型,正确定位它,并为建模设置进行分割。
无刷电机机器人关节
无刷电机为机器人手臂提供更高的功率重量比,在这个视频中,我们将看到如何为这种机械臂组装机器人关节。
ABB机器人连接插件功能
学习如何将机器人程序处理为ABB的RAPID语言,并使用虚拟组件的连接插件功能在ABBRobotStudio上的虚拟控制器上运行代码。
机器人传感器解决方案
西克(SICK)公司的工业传感器解决方案适用于工业机器人的各个领域,为工业机器人应用带来革新。
观看记录: