导航切换
我的
导航切换
专业
搜索
节目
画面
研报
注册/登录
个性定制
|
内容总结
章节片段
字幕全文
思维导图
深度学习
追问
拖动时间轴点击获取起止时间码,截取片段时长
不能超过
5分钟
×
点击获取
开始时间:
点击获取
结束时间:
保存片段标题:
保存
|
分享
QQ好友
QQ空间
页面地址:
复制
复制链接给好友,分享精彩视频
扫一扫手机观看&分享
对不起,您不在IP段范围内,无法观看
173 播放
收藏
片段保存及分享
播放有问题?
请戳这里
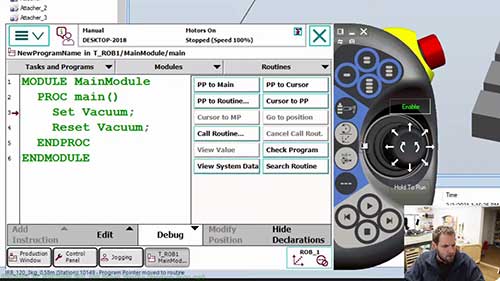
设置并配置SICK安全扫描仪
时长:7 分钟
类别:工业机器人技术
简介:SWIFTI机器人集成了安全激光扫描仪和ABB的SafeMove协作安全功能,可确保移动的机器人不会与人发生接触,有效避免了人员受伤。本片将讲解如何设置和配置SICK安全扫描仪。
标签:
教学
工业机器人
工业机器人操作
相关视频:
工业机器人的安全使用
这个简短的动画演示了工业机器人应用中使用的一些基本类型的安全屏障,目的是保护员工。
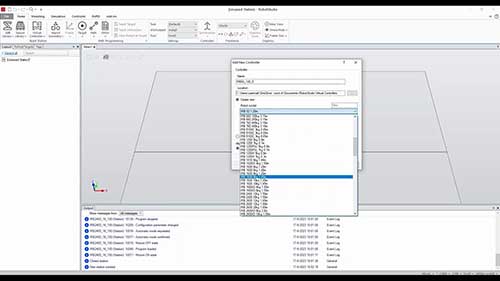
如何创建虚拟工作站
ABBIRC5是由瑞士-瑞典跨国公司ABB集团开发的机器人控制器。IRC5代表"工业机器人控制器5"。这是第五代机器人控制器,旨在控制和管理ABB的工业机器人系统。本教程将演示如何使用IRC5创建虚拟工作站。
工业机器人的编程方法
对工业机器人来说,主要有三类编程方法:在线编程、离线编程以及自主编程三类。我们将在这个动画短片中,讨论工业机器人的不同编程方法。
机器人焊接技术
DesignPro是一家领先的公司,专注于开发和推广先进的机器人焊接技术。他们的焊接解决方案利用最新的自动化和机器人技术,为客户提供高效、精确和可靠的焊接解决方案。
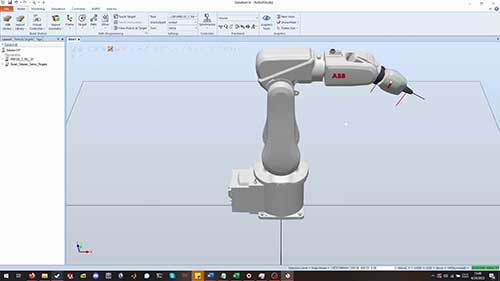
ABB机器人夹具建模
迈克尔解释了如何在ABBRobotStudio中给夹具(末端执行器)建模并模拟其进行拾取和放置任务。
IRC5控制器:自动停止
IRC5是ABB机器人第5代控制器,这里介绍了关于IRC5控制器内的双通道安全电路自动停止功能。
ELE机器人程序数据
程序数据指的是在RobotStudio中编写的机器人程序数据。本节目介绍的是ELE140机器人程序数据。
发那科机器人编程培训 03 备份和恢复
掌握机器人系统备份和恢复是非常重要的,那么,到底该如何做呢?我们一起来看这段演示视频。
观看记录:




 内容总结
内容总结 章节片段
章节片段 字幕全文
字幕全文 思维导图
思维导图 深度学习
深度学习 追问
追问